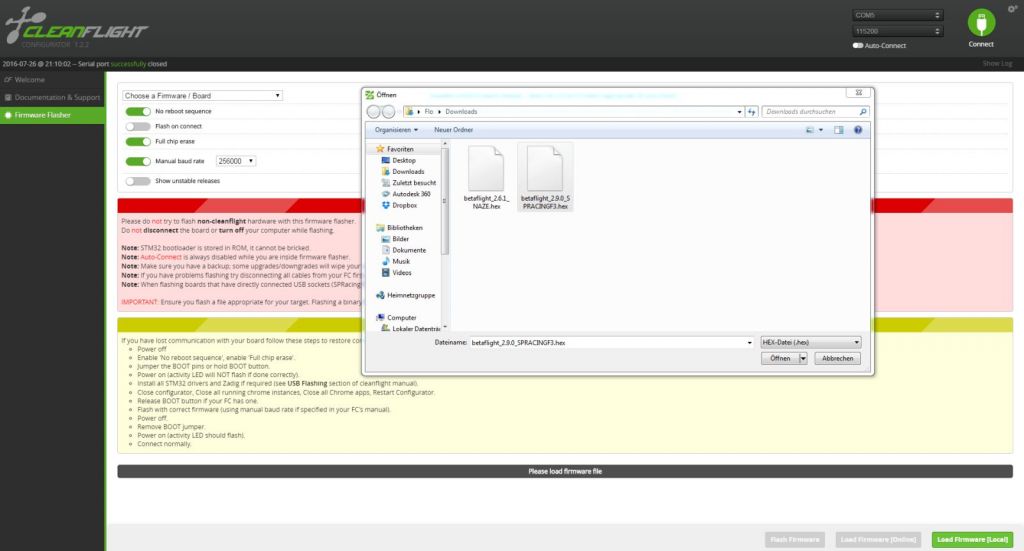
Nachdem ich meinen Dubai 210 Copter fertig montiert hatte ging es an die Software des “Dubai 210“. Zuerst habe ich Betaflight geflasht. Dies ist bei dem Clon der SPRacing F3 garnicht mal so einfach. Ihr müsst zuerst die Bootpins brücken (neben der Leiste mit den Motorausgängen) und dann erst USB anstecken. Im gebrückten Zustand öffnet ihr die Cleanflight Chrome App wählt ihr dann folgende Settings wie im Bild:
Flash Firmware
Flash Firmware des Dubai Racecopter:
- no reboot sequence
- Full Chip erase
- Manual baud rate 256000
Danach ladet ihr euch die neueste Betaflight herunter, geht auf “Load Firmware [LOCAL]”und wählt die heruntergeladene Datei aus. Ein Klick auf “Flash Firmware” sollte die Firmware hochladen. Oft bricht er bei der Hälfte ab, dann einfach nochmal auf “Flash Firmware” drücken oder USB aus- und wieder anstecken. Sollte es garnicht erst anfangen zu flashen dann überprüft ob die Bootpins wirklich gebrückt sind.
Anschließend könnt ihr die Verbindung zwischen den Bootpins wieder trennen und die Betaflight Chromeapp starten. Ein Klick auf Connect und die FC sollte sich mit dem Configurator verbinden.
Einstellungen Racecopter
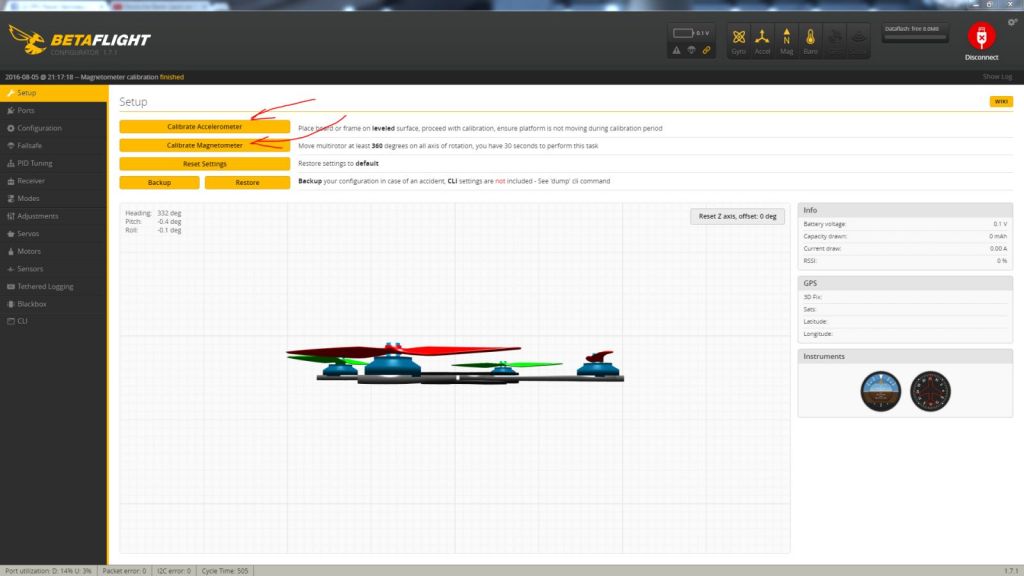
Im Setup-Fenster könnt ihr nun ACC und Magnetometer kalibrieren FALLS ihr sie verwendet. Dazu einfach den Anweisungen rechts neben den Buttons folgen. DIe Sache ist eigentlich selbsterklärend.
Als nächstes könnt ihr im Port-Fenster die Ports einstellen an denen ihr SBUS und SBUS Telemetrie angeschlossen habt. Dazu müsst ihr beim Port der Telemetrie das SmartPort Protokoll aktivieren und beim Port an dem ddie Steuerdaten ankommen müsst ihr “Serial RX ” setzen. Falls ihr keinen SBUS Empfänger benutzt fallen diese Schritte weg.
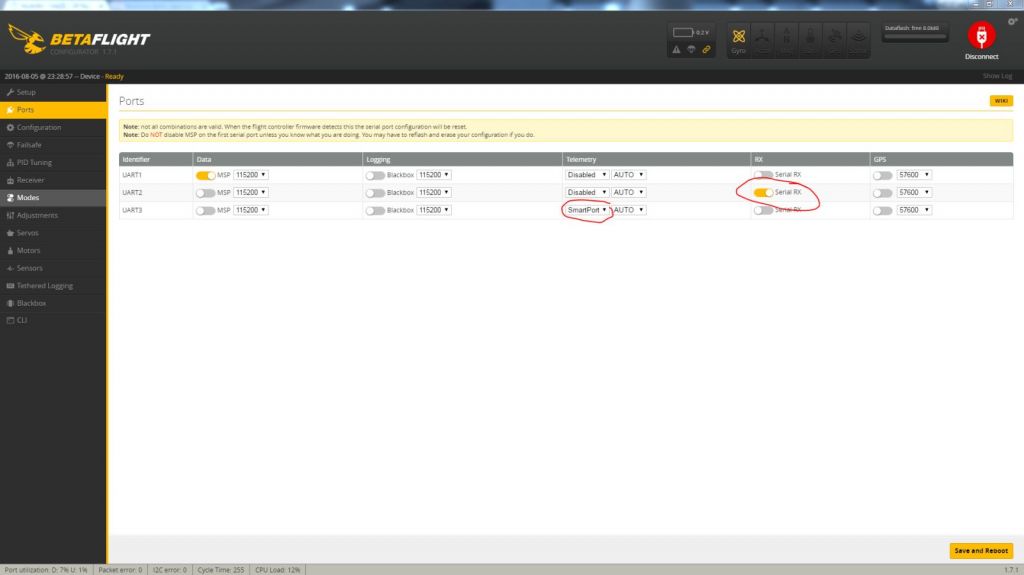
Port Konfiguration
Änderungen
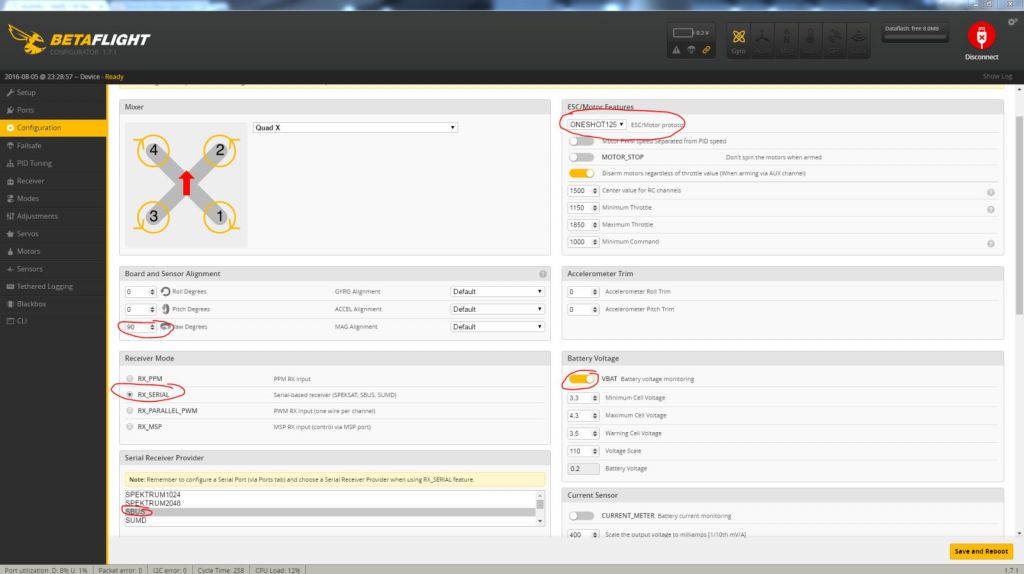
So dann kann es weitergehen. Öffnet das Configuration-Fenster und macht folgende Änderungen:
- ESC auf Oneshot125 stellen
- Board Alignment auf 90 Grad (falls ihr es so eingebaut habt wie ich)
- Vbat aktivieren und Telemetrie anschalten (rechts unten, nicht auf Bild)
- Telemetrie aktivieren
Damit euer Empfänger später mit euch redet müsst ihr noch eine kleine Einstellung vornehmen
- Falls SBUS: RX_Serial und dann SBUS wählen
- Falls Parallel: RX_Parallel_PWM wählen
- Falls PPM : PPM RX Input wählen
Failsafe deaktivieren
Dann solltet ihr auf jeden Fall noch kurz auf den Failsafe-Tab gehen und den Failsafe deaktivieren. Sonst kann es sein dass euch der Copter demnächst wegfliegt 😉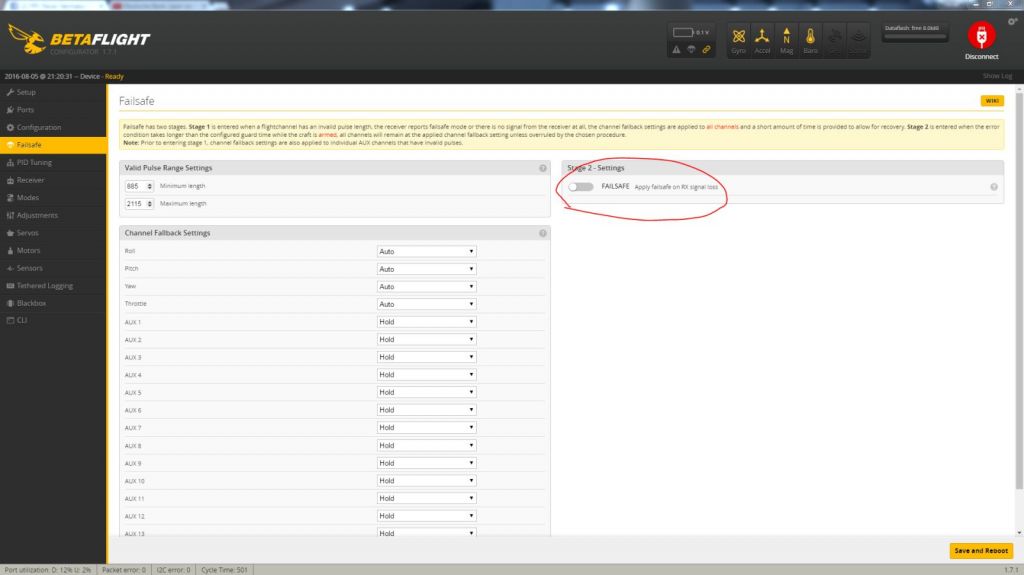
Nun könnt ihr den Betaflight-Configurator schließen und die neuste BLHELI-Suite herunterladen. Da ihr die FC als Programmer nutzt müsst ihr das Cleanflight-Passtrough auswählen.
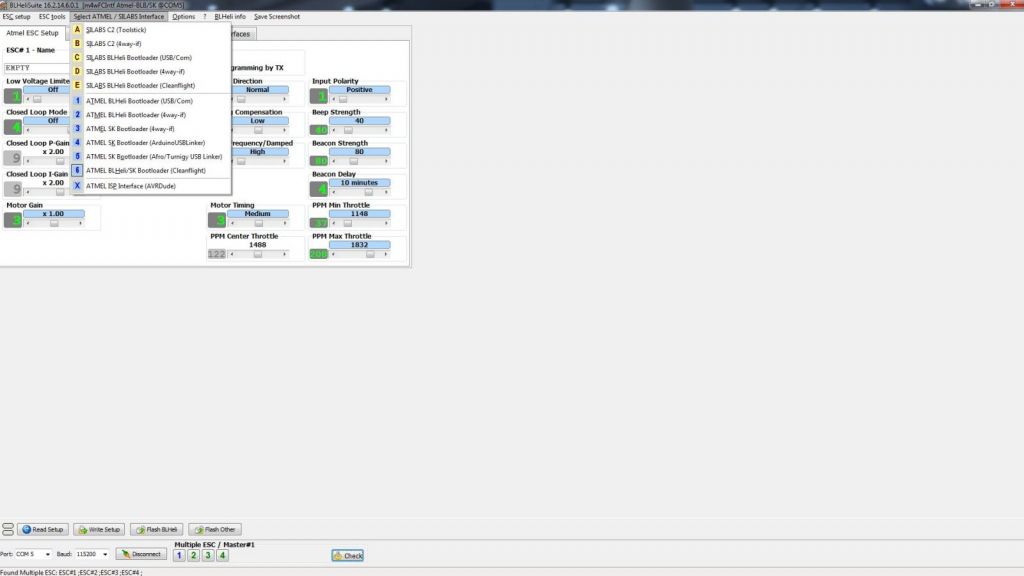
BL-Heli Suite
Dann wählt ihr unten den Comport, drückt auf Connect und Check. Die 4 ESC sollten nun angezeigt werden. Ein Klick auf “Flash BlHeli” und die Regler bekommen die neueste Firmware auf den Speicher 😉
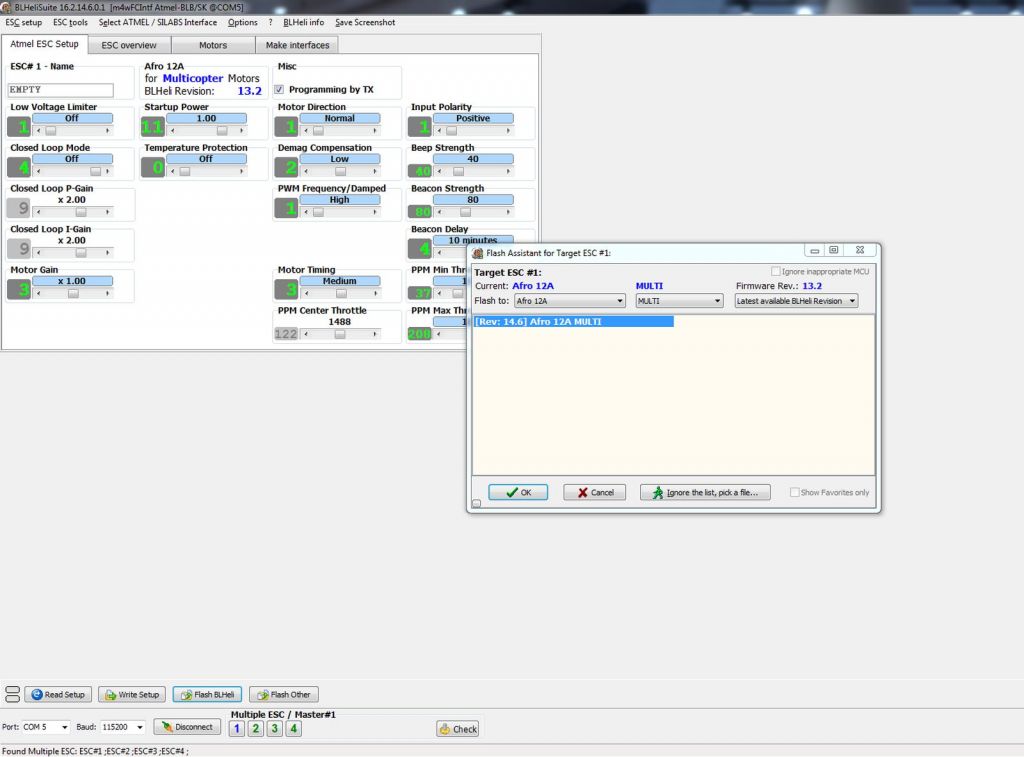
Flash ESC Firmware
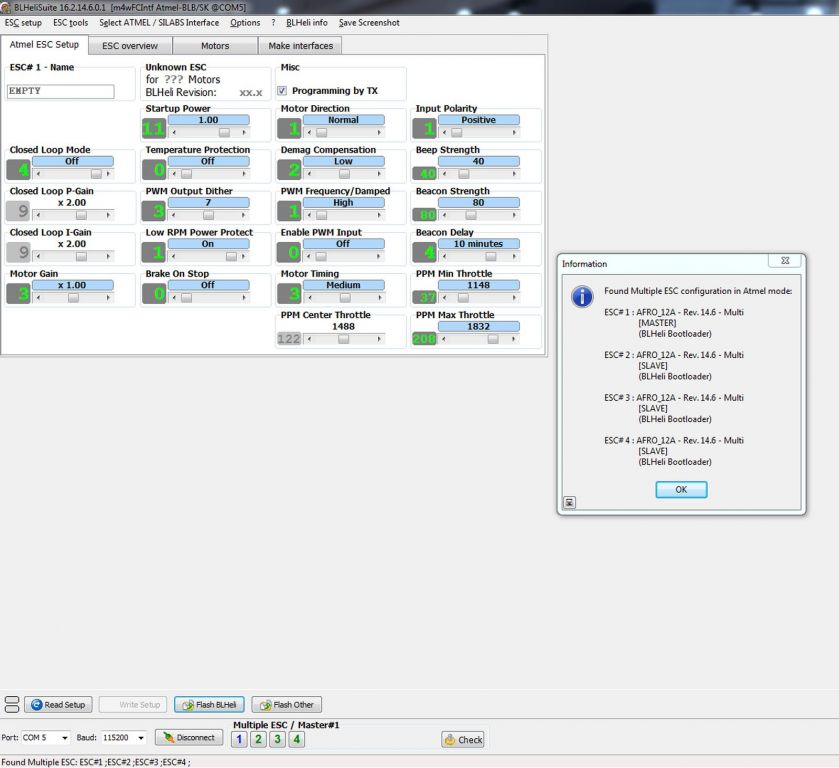
Beste Einstellungen für Dubai Racecopter
Danach müsst ihr noch die Settings für die Motoren einstellen. Ich habe lange rumprobiert und finde dass die folgenden Settings optimal sind. Ein Klick auf “Write Setup” und die Einstellungen werden übertragen.
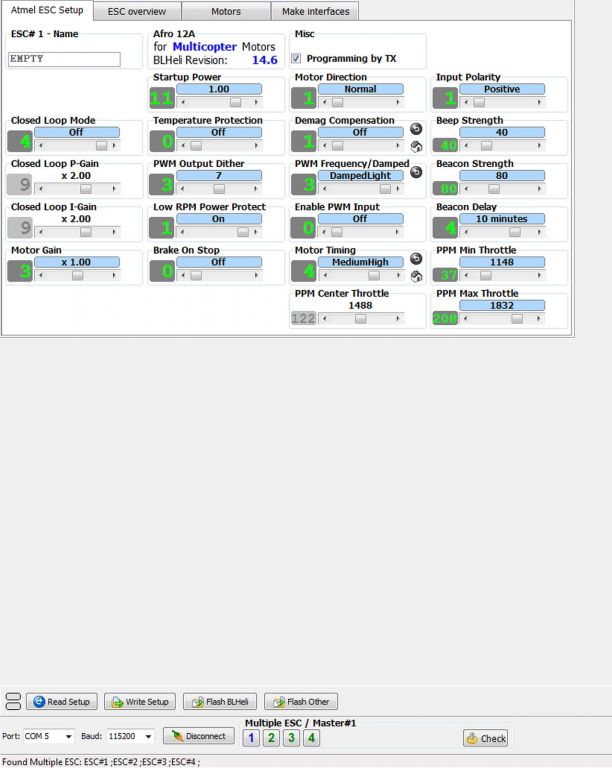
Beste Einstellungen für Dubai Racecopter
Hinweis 4S
[stextbox id=”achtung”]Die Settings sind für 3S gedacht. Die Regler sind NICHT für 4S mit dieser Motorkombination geeignet. Da ich aber fast nur 4S fliege habe ich deswegen jetzt DYS XS30A mit BlHeli_S verbaut.[/stextbox]
Betaflight Regler kalibrieren
Nachdem ihr nun die Regler eingestellt habt müsst ihr diese noch kalibrieren. Dazu öffnet ihr wieder den Betaflight Configurator und klickt auf den Motor Tab.
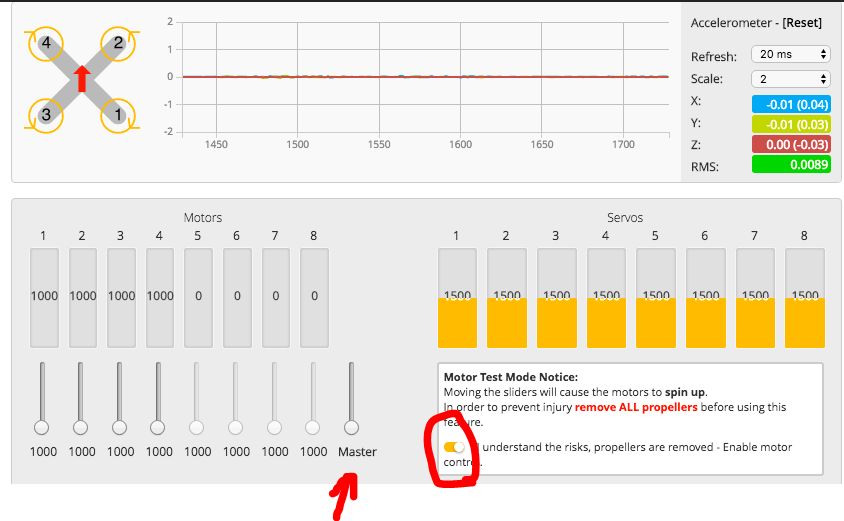
Regler anlernen
[stextbox id=”alert”]Wichtig: Bitte Propeller abmontieren für die folgenden Schritte![/stextbox]
Am Copter darf noch KEIN Akku angeschlossen sein. Dann deaktiviert ihr die Sperre und stellt alle Motoren auf Vollgas. Nun dürft ihr den Copter am Akku anstecken und die ESC sollten piepen. Wenn sie fertig sind dann wieder das Gas aller Motoren auf Null. Die ESC sollten nun wieder piepen. Nun noch einmal Vollgas und danach wieder Nullgas. Die ESC sollten nun einen anderen Ton von sich geben und signalisieren dass sie angelernt sind.
Nochmal in Kurzfassung:
Akku abstecken -> Motoren Vollgas -> Akku anstecken -> Motoren Null -> Motoren Vollgas -> Motoren Null -> Fertig.
Bei dieser Prozedur sollten die Motoren nicht andrehen sondern nur piepen!
Damit wären die Grundeinstellungen geschafft und es kann mit PID-Tuning weitergehen. Ihr könnt jetzt schonmal probefliegen um zu schauen ob alles soweit passt. Der Copter sollte fliegen, wird aber noch nicht optimal in der Luft liegen.
8 Kommentare
Hallo.
Ich habe den Dubai auch gerade fertiggestellt. Kannst du bitte mal deine PIDs teilen? Ich kriege da nichts Anständiges hin.
Danke schonmal
Hey Tony, hast Du die aktuelle Betaflight drauf? Die sollte eigentlich ohne Änderung am PID Regler super fliegen! Zumindest im Acro Mode!
Ja. Ich habe Betaflight 3.2.1 drauf. Ich möchte aber auch gerne Horizon nutzen und da bin ich noch nicht besonders zufrieden. Hast du da ein paar PIDs, die mir helfen könnten?
Danke schonmal.
Oszilliert er denn im Horizon Mode? Oder ist er dir zu träge? Habe leider keine PID’s fürn Horizon Mode, da ich acro fliege… mhmm
Er oszilliert leicht.
Dann würde ich P etwas verringern. Schreib doch mal deine PID’s hier rein..
pitch = 40, 40, 20
roll = 62, 40, 20
yaw = 82, 40
Also am besten wäre es, du fängst bei null an… Die Werte muss man sich erfliegen.
Welche Achse Oszilliert? Roll oder Pitch Achse? Links/Rechts oder Vorne/Hinten?
Du hast ja P schon runter auf 40 (Glaub 44 ist hinterlegt?) Ist es besser geworden?
Das hat mir immer sehr geholfen: http://www.technik-consulting.eu/Optimierung/Drohne_PID-Regelung.html