Kurzes Vorwort: Gearbest hat uns, genauso wie einigen anderen Seiten, das Set “Dubai 210” zum Testen kostenlos zur Verfügung gestellt. Normal sind wir bei sowas eher zurückhaltend weil wir keine Produkte “schönreden” wollen und lieber unsere eigene, teils harte, Meinung dazu preisgeben . Dass dies dann schnell zu Differenzen zwischen Hersteller und Blogger führen kann dürfte jedem einleuchten. Aber in diesem Fall bestand das Set aus durchgehend gut ausgesuchten Komponenten also haben wir uns dazu entschieden dazu einen mehrteiligen Bericht zu schreiben.

130€ Dubai 210mm Racing Quadcopter angetestet – Baubericht – Teil 1
Lieferumfang
Nach dem Auspacken des Luftpolster-Päckchens lagen folgende Komponenten auf unserem Tisch.

Lieferumfang Originalverpackt
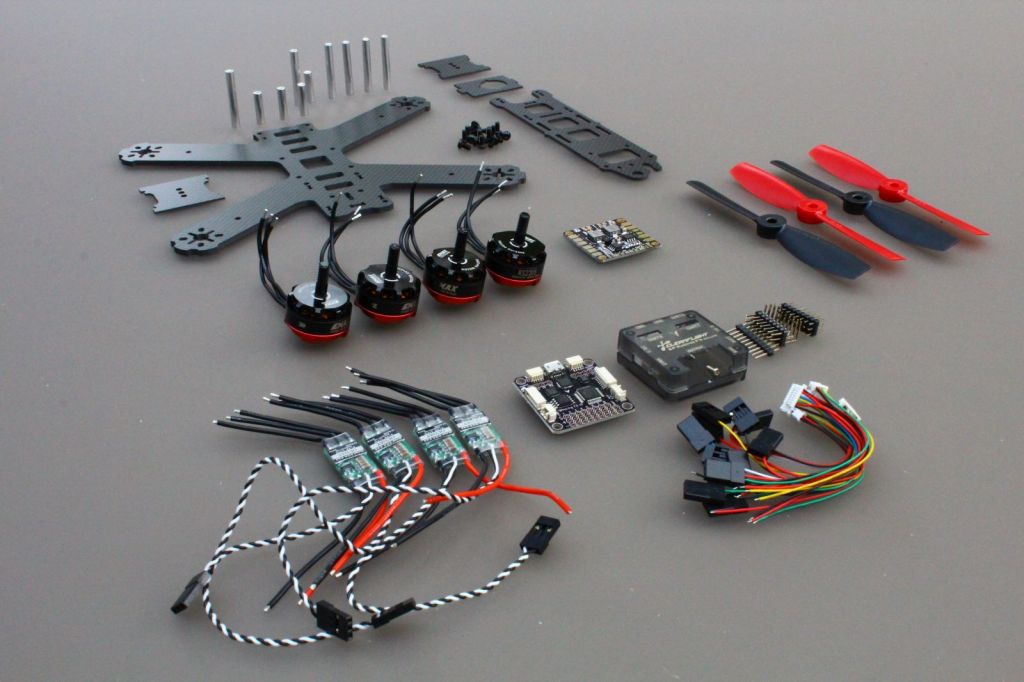
Lieferumfang des Dubai 210 Racecopters
Schmuckstück: Motoren
Ein besonderes Schmuckstück sind ohne Frage die Emax RS Motoren. Diese sind hervorragend verarbeitet und werden mit einem wirklich mehr als großzügigen Zubehör geliefert.
In so einer Dose befinden sich:
- jeweils 5 Schrauben in 3 Längen
- ein Inbusschlüssel
- ein Sprengring
- 3 Messingscheiben zum Unterlegen gegen axiales Spiel

Zubehör der Motoren
Der Zusammenbau
Nun mache ich mich an den Zusammenbau. Zuerst befestige ich den Stromverteiler auf der Centerplatte des Lisam 210. Da das CFK sehr gut leitet benutze ich dafür M3 Plastikschrauben (!) und Nylon Unterlegscheiben.

Centerplatte mit Nylonschrauben
Zusätzlich zur Schraubbefestigung nutze ich immer dünnes Spiegelklebeband um das PDB am CFK zu fixieren (und isolieren) . Selbst wenn die Schrauben bei einem harten Crash brechen sollten bleibt das PDB an dem leicht elastischem Tape hängen und erzeugt keine Kurzschlüsse.
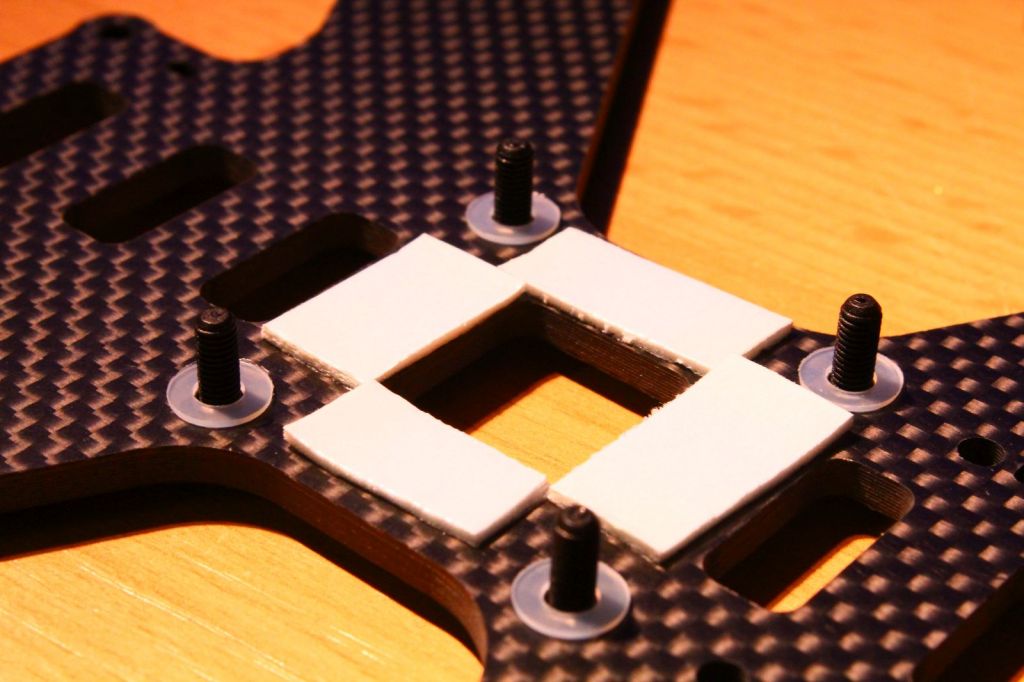
Spiegelklebeband
Jetzt wird das PDB draufgesetzt und mit Distanzbolzen verschraubt. Um die Bolzen gegen Vibrationen zu sichern benutze ich ein rotes Loctite Coating das eigentlich für Platinen gedacht ist.
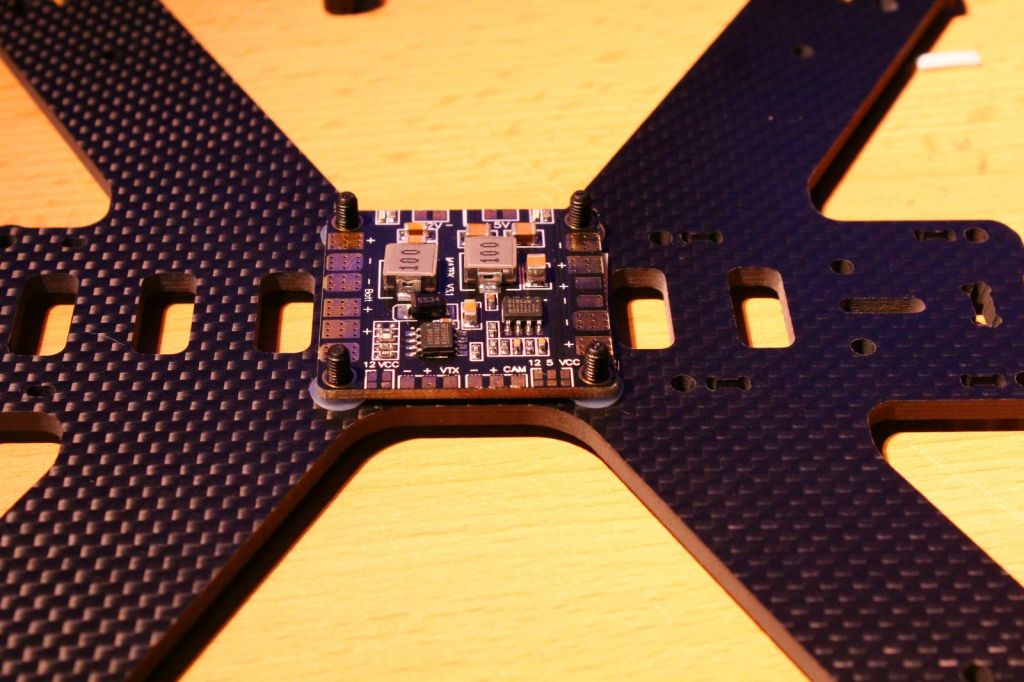
PDB
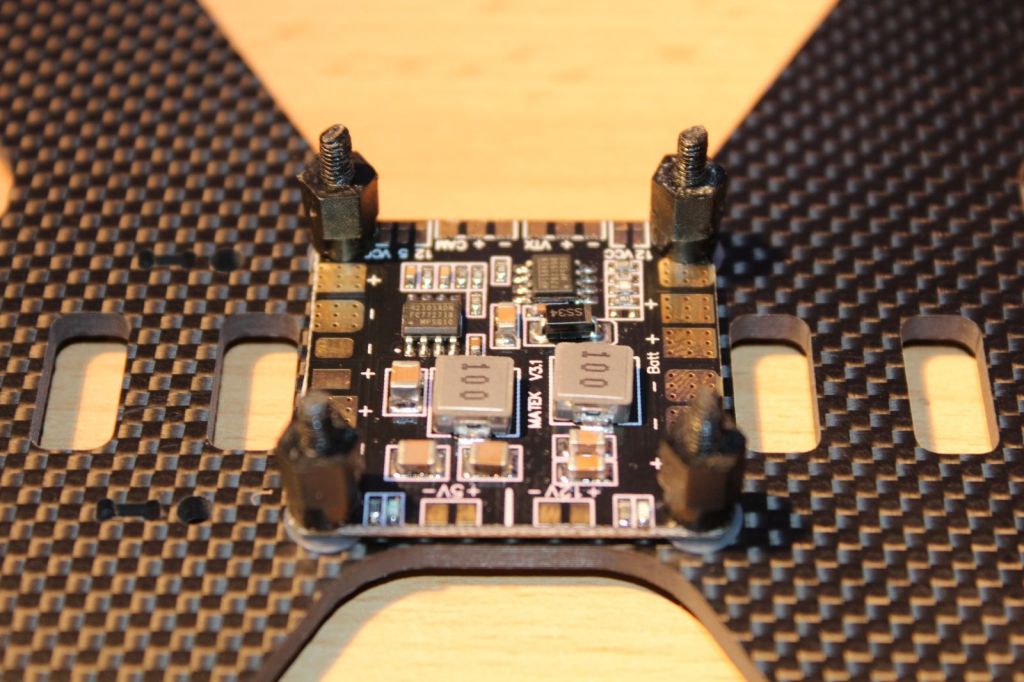
PDB
Motoren
Jetzt ging es mit den Motoren weiter. Zur Motorbefestigung habe ich die kürzesten der 3 Schraubenarten aus dem Emax-Schächtelchen genutzt. Längere Schrauben beschädigen die Wicklungen also bitte passt auf sonst ärgert ihr euch später 😉 . Wie immer müssen solche Alu auf Alu Verbindungen mit Schraubensicherung gegen herausrütteln gesichert werden. Bei der Schraubensicherung empfiehlt es sich eine “normal” feste zu wählen. Viele Billigsorten aus dem Baumarkt sind dabei aber oft zu stark oder zu schwach, was postwendend in kaputten Schraubenköpfen oder verlorenen Schrauben endet. Ich kann euch nur empfehlen ein Markenprodukt zu kaufen oder die billige vorher erst an etwas unwichtigem zu testen.

Loctite ein muss!
Alle 4 Motoren werden nach dem gleichen Prinzip befestigt. Ihr müsst auf die Drehrichtung achten sonst lösen sich die Muttern selbstständig während des Fluges.

Regler vorbereiten
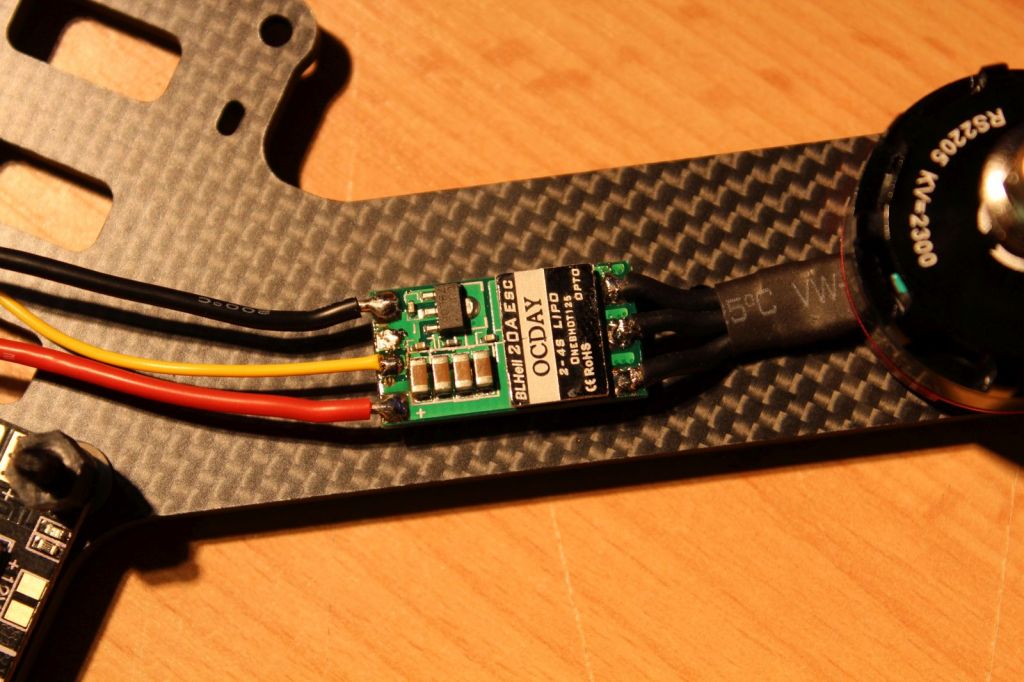
Jetzt habe ich den Frame erstmal beiseite gelegt und habe die Regler für den Einbau vorbereitet. Natürlich kann man diesen Schritt auch auslassen und einfach die vorhanden Kabel zusammenlöten und mit Schrumpfschlauch isolieren. Aber das gibt nur Kabelsalat und gebrochene Lötstellen, daher lohnt sich dieser Schritt durchaus.
Wie unten links im Bild zu sehen habe ich zuerst alle 3 Motorkabel abgelötet und das Signalkabel entfernt. Die Masse des Signalkabels wird nicht benötigt, daher habe ich eine einzelne Litze am Signaleingang angelötet die später mit der FC verlötet wird.
Noch ein Wort zu den Reglern: Diese sind in meinen Augen das einzige Element im Set das etwas besser sein könnte. Blheli_S fähige Regler würden zum F3 Prozessor der FC deutlich besser passen und würden sicherlich auch den Preis nicht so stark in die Höhe treiben. Wer weiß, vielleicht wird das Set ja dahingehend noch ein Update bekommen. Fliegen werden beide sicherlich , nur würde die Performance nochmal ein kleines Stück zunehmen.

Vorbereitung der Regler
Motoren Kabel kürzen
Im nächsten Schritt nehme ich wieder meinen Frame und kürze die Motorkabel so dass noch ca. 3 cm aus dem Schrumpfschlauch herausschauen . Dann verlöte ich diese mit den bereits vorbereiteten Reglern.
Nachdem ich das mit allen 4 Motoren gemacht habe schrumpfe ich die Regler mit (durchsichtigem) Schrumpfschlauch ein und klebe ein Stück Spiegelklebeband unten an den Regler. Dies hat folgenden Grund: Wenn der Regler “hart” auf dem CFK aufliegt können durch die Erschütterungen und Schläge bei einem Crash die Keramikkondensatoren auf der Platine brechen. Folge ist oft ein abbrennen des Reglers. Daher macht es durchaus Sinn eine Schicht zur Dämpfung unterzulegen.

Regler mit Spiegeltape
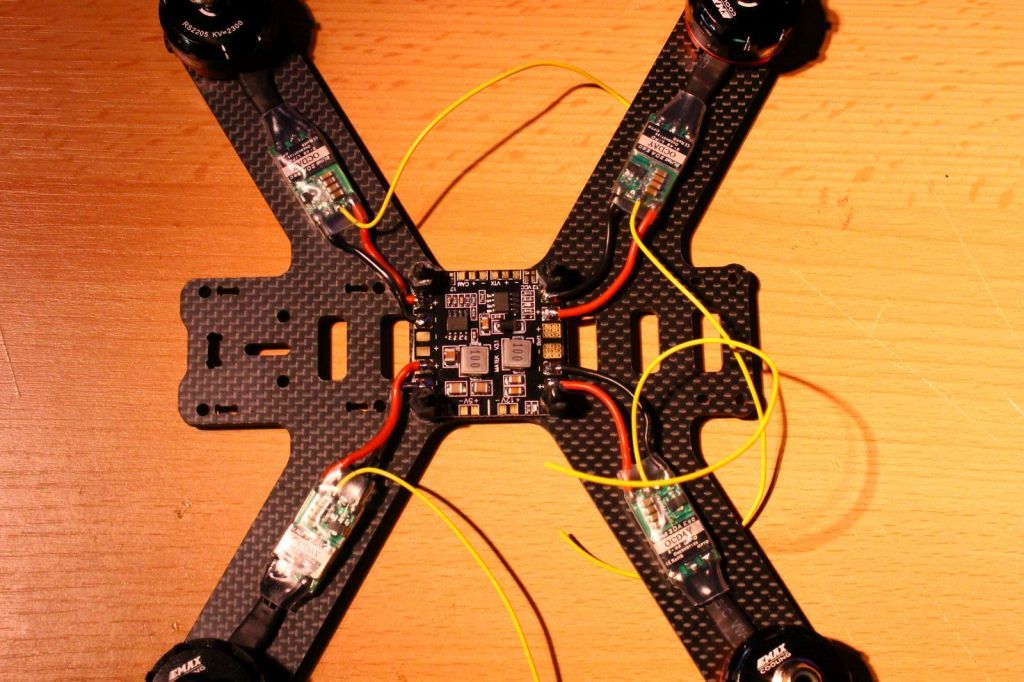
Wenn ihr das alles gemacht habt sollte der Copter jetzt so aussehen:
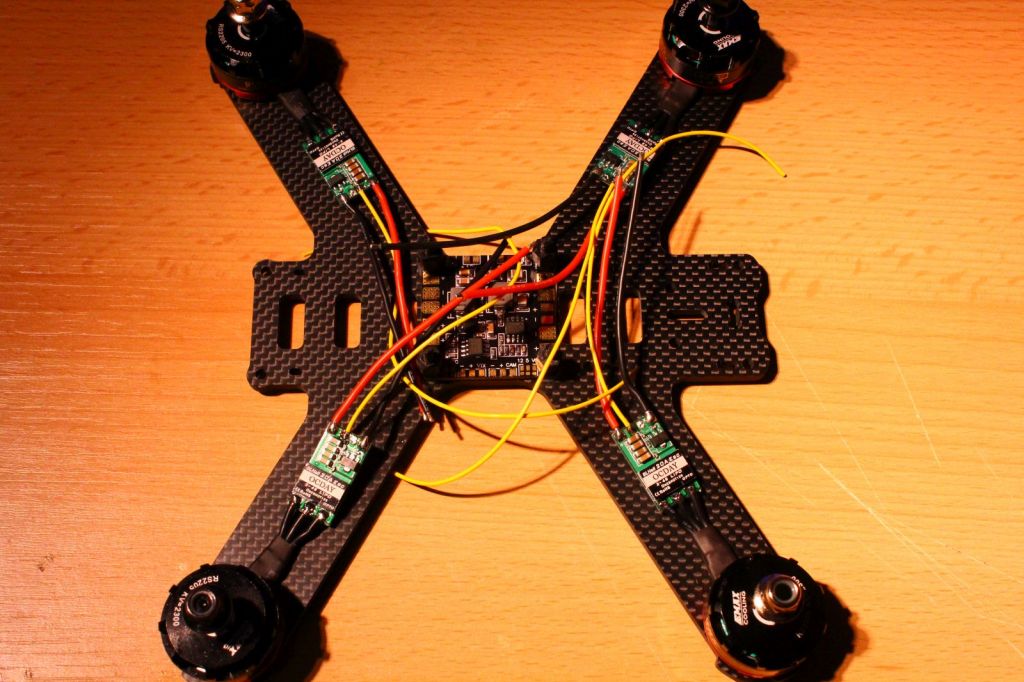
Fertige Centerplatte
Weg mit dem Kabelsalat
Dem Kabelsalat geht es jetzt an den Kragen. Die Kabel werden so zurecht geschnitten dass diese ohne mechanische Spannung an das PDB gelötet werden können. Die Lötstellen sollten nie unter mechanischer Belastung stehen, daher sollte man lieber ein paar mm mehr Kabel lassen . Besonders ist auch auf die Spacer zu achten. Die Kabel müssen um den Spacer außen herum und müssen daher etwas länger sein. Zusätzlich habe ich die Kabel im Bereich des Spacers mit (durchsichtigem) Schrumpfschlauch gegen mechanischen Abrieb gesichert. Man kann dies bei genauem Hinschauen auch im Bild erkennen.
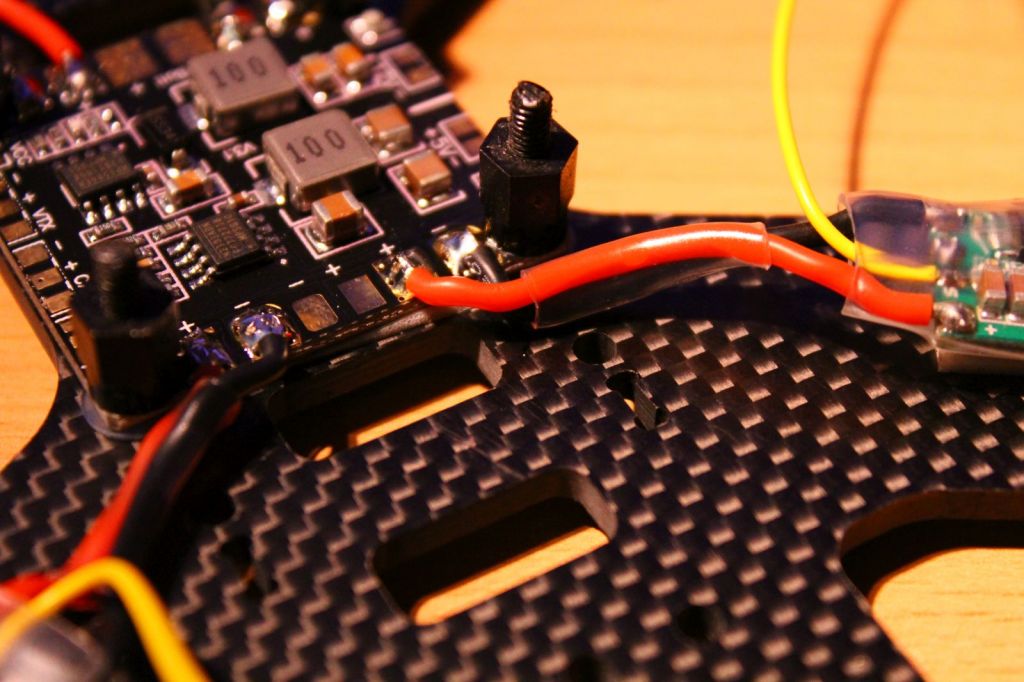
Man sieht rechts im Bild schön dass das Kabel extra etwas länger ist um am Spacer vorbeizukommen.
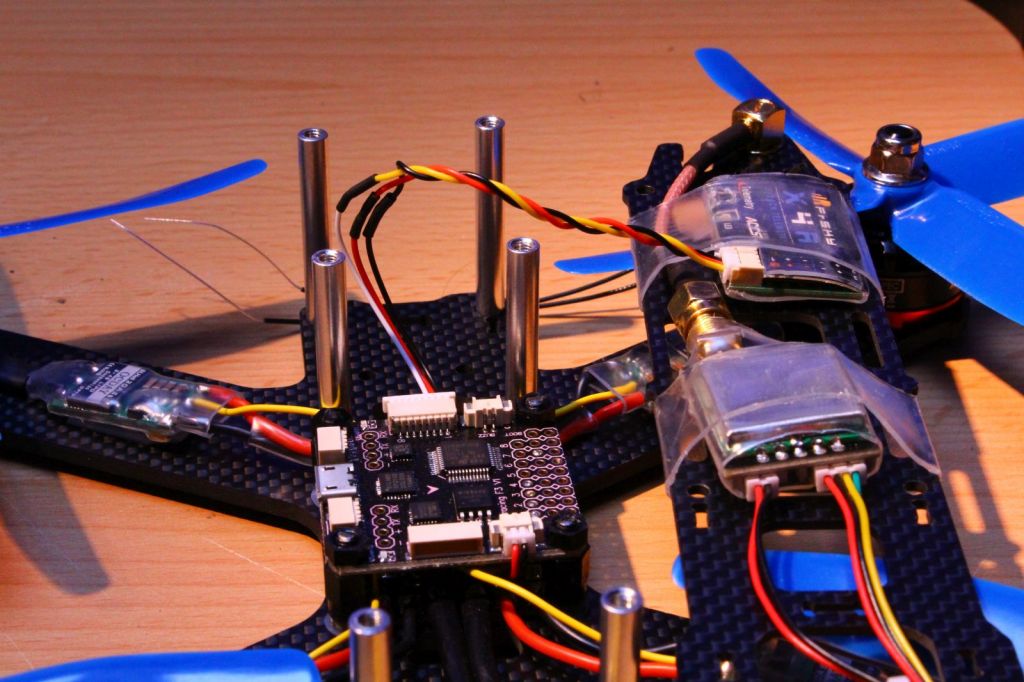
Nun geht es weiter mit dem Gehirn des Copters, der FC alias Flightcontrol. Diese ist in dem Paket ein Clon der Spracing F3 Deluxe und ist daher auf jeden Fall eine der aktuelleren FCs auf dem Markt. Mit der Einstellung der FC beschäftigen wir uns in einem anderen Teil nochmal.
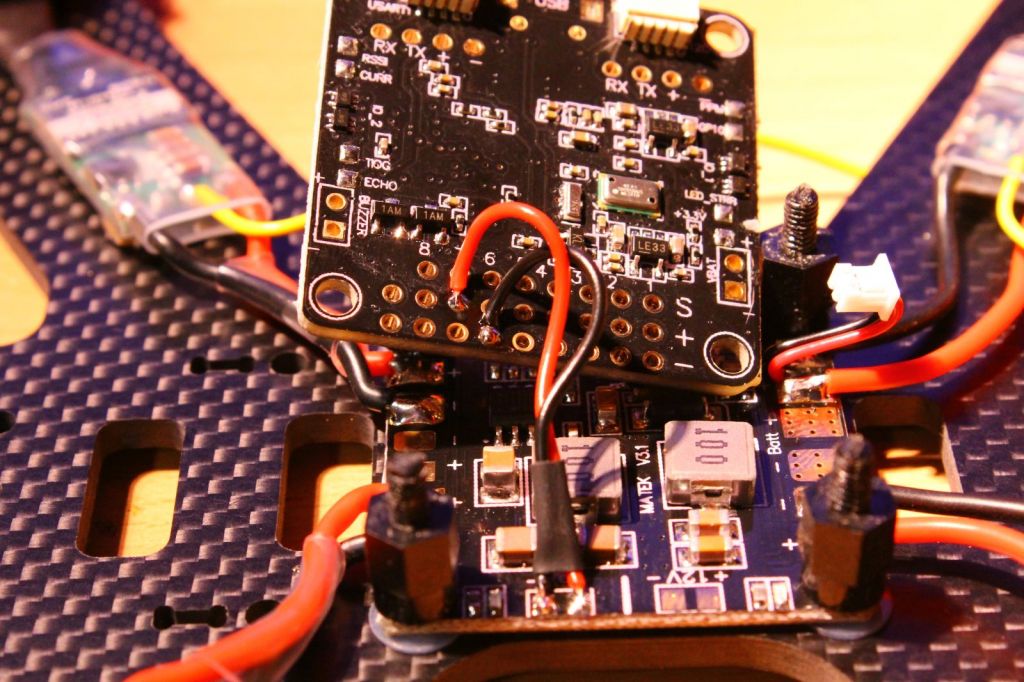
Zuerst bereite ich die Spannungsmessung und die Stromversorgung der FC vor. Dazu löte ich das Kabel für den VBAT- Eingang so an, dass es problemlos in den dazugehörigen Eingang der FC gesteckt werden kann. Die Kabel für die Stromversorgung der FC löte ich an dem 5V Ausgang des PDB an. Zusätzlich schütze ich das Kabel mit Schrumpfschlauch gegen Abrieb, da dieses direkt über die Keramikkondensatoren und die Kante der Spule geht.

Kabel an Plus und Minus
Dieses Kabel löte ich dann auch an einem der Plus- und Minuspols der Flightcontrol an.
Regler an die Motorausgänge
Als nächstes löte ich die Kabel der Regler an die Motorausgänge der FC. Das Ausgangs-Schema habe ich euch aus Cleanflight herauskopiert und im Bild eingefügt.
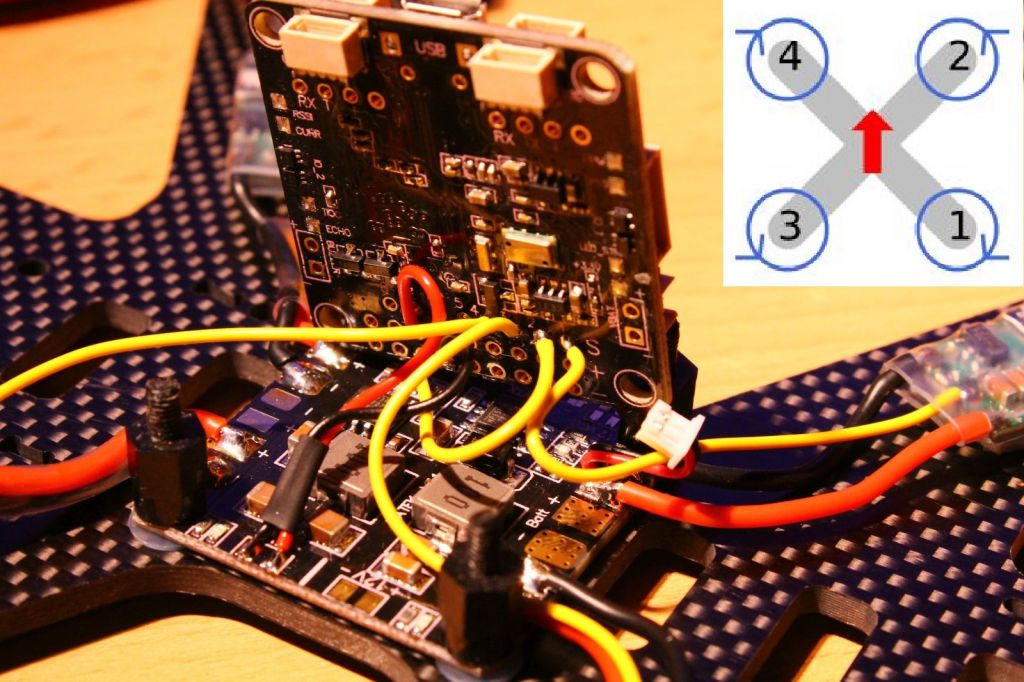
Regler richtig anschließen
Danach kann ich nun endlich meine FC mit Muttern befestigen (und mit Lack sichern). Danach habe ich auch gleich die silbernen Spacer mit Schraubensicherungslack eingestrichen und festgeschraubt.
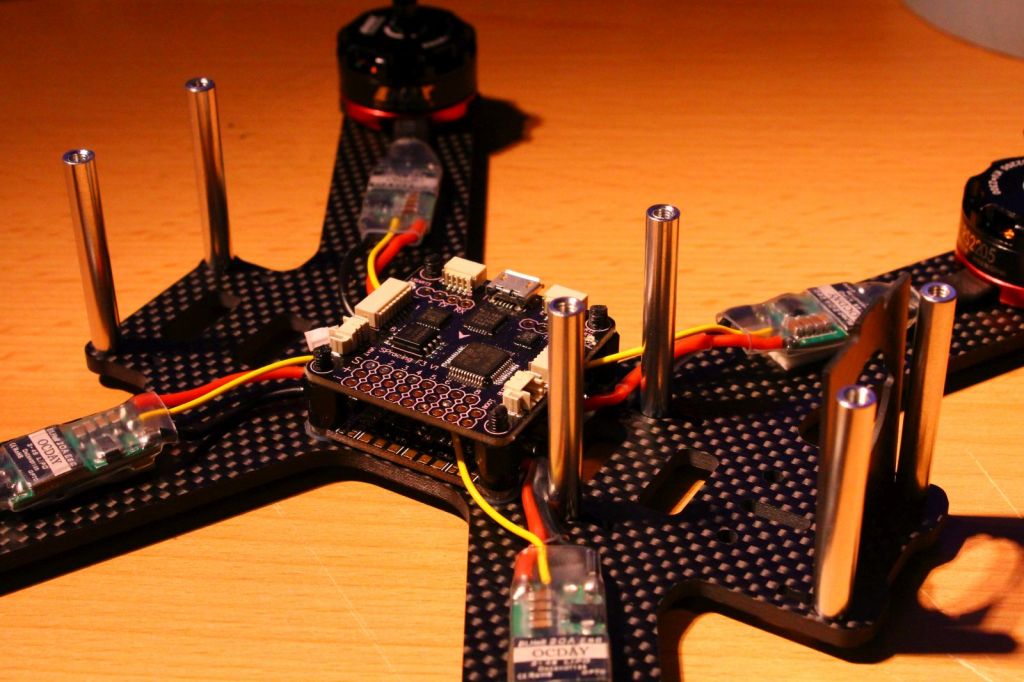
Flightcontrole anschließen
Einbau von FPV Ausrüstung und RC Empfänger
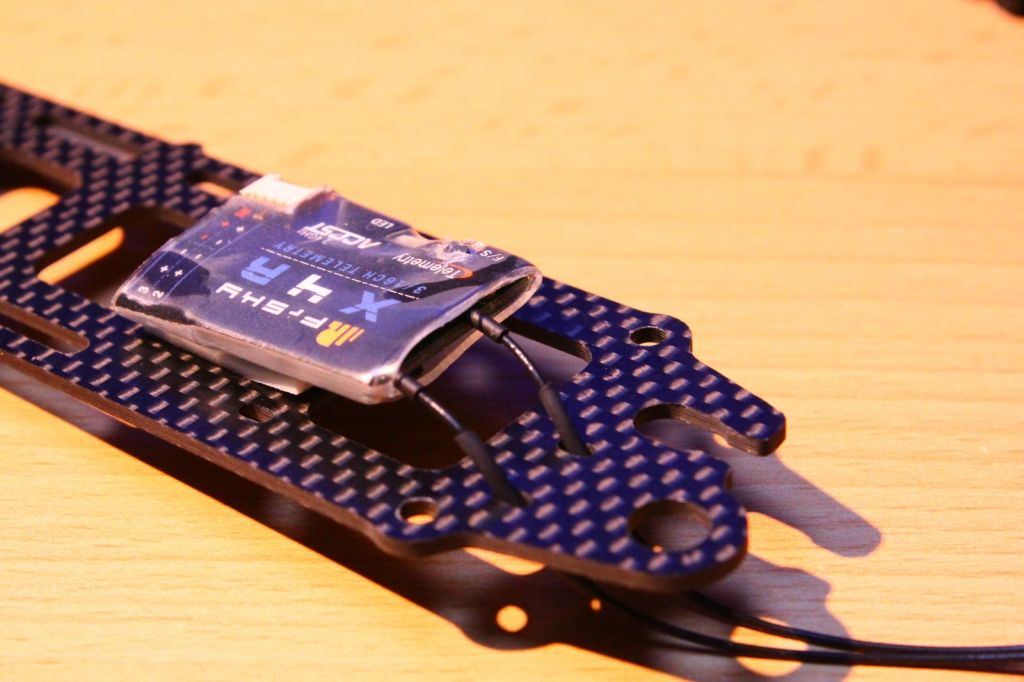
Den Frame kann ich nun kurz beiseite legen und mir die Topplatte genauer anschauen. Dieser Teil wird weniger ausführlich, denn Sender und Empfänger sind nicht im Set enthalten. Da wird auch jeder seine Vorlieben haben und sein Equipment entsprechend wählen. Am hinteren Ende befestige ich meinen X4R-SB Empfänger. Die Antennenkabel passen schön durch die 2 kleinen Ausfräsungen, müssen aber in dem Bereich mit Schrumpfschlauch gegen Abrieb geschützt werden, sonst sind sie bald kaputt.
Als nächstes habe ich den FPV-Sender (hier einen FT200 von Banggood) eingebaut. Um die mechanische Einwirkung auf den Sender so gering wie möglich zu halten habe ich ein kurzes SMA Kabel verwendet und die rechtwinklige Buchse am Ende mit dem Frame verschraubt.
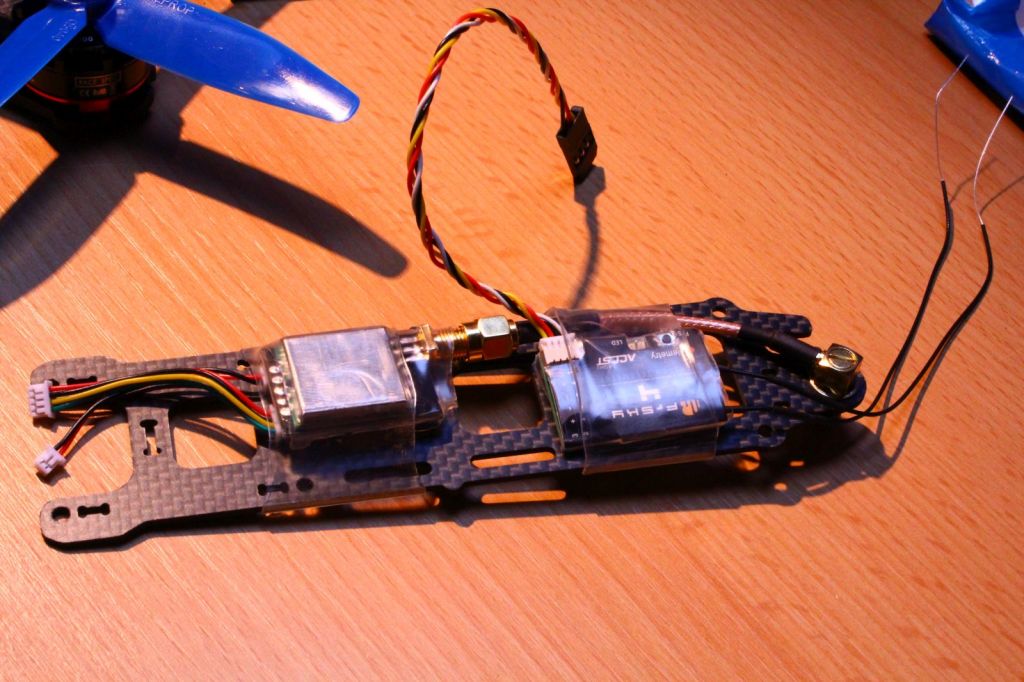
Um die Antennen von den Propellern fernzuhalten habe ich Kabelbinder benutzt, die ich mit 3 Lagen Schrumpfschlauch ummantelt habe. Dadurch sind diese so “zäh” dass sie sich im Flug nicht biegen, beim Crash aber problemlos nachgeben.

Antennenbefestigung mit Schrumpfschlauch
Den D4R-SB habe ich nun an den IO_2 Port der FC angeschlossen. Telemetrie kann über den UART2 (links neben dem USB) an den Empfänger übergeben werden.
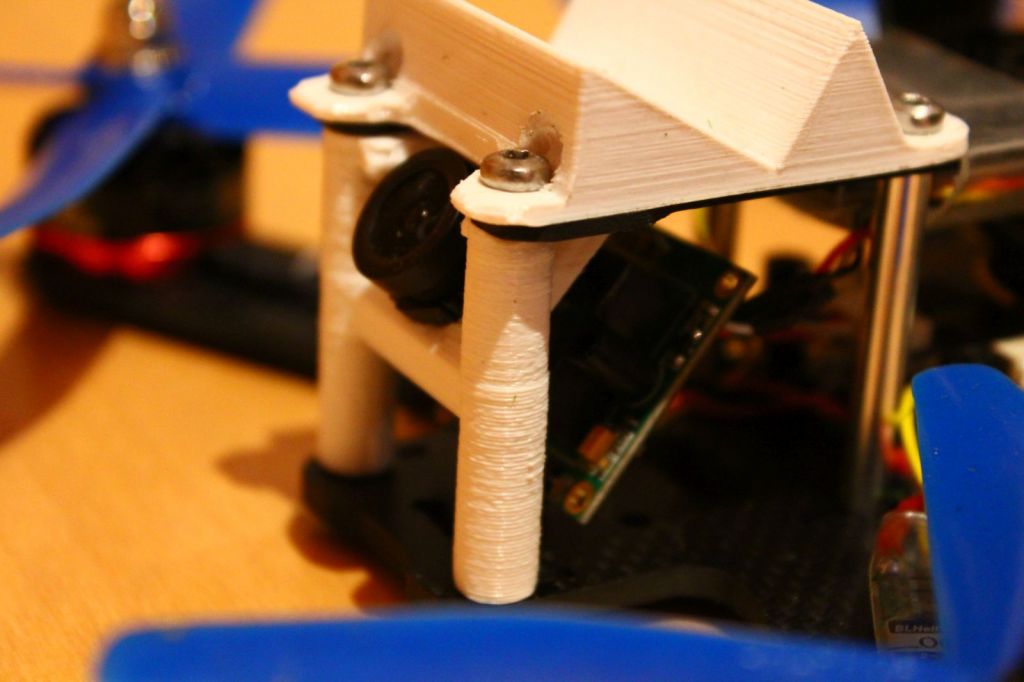
Kamerahalterung 3D gedruckt
Für die Kamera habe ich eine Kamerahalterung mit 35 Grad Neigung von Thingverse vom Kollegen drucken lassen. Zusammen mit der PZ0420M funktioniert die Konstruktion hervorragend. Die alte Sony 600TVL dagegen stößt fast am Frame an. Das Druckteil bekommt ihr hier: Thingiverse.com
130€ Dubai 210mm Racing Quadcopter angetestet – Baubericht – Teil 1
Nach Verkabeln der FPV-Komponenten und festschrauben der Topplate ist der mechanische Teil soweit erstmal fertig und wir können uns im nächsten Teil der Software widmen.
130€ Dubai 210mm Racing Quadcopter angetestet – Baubericht – Teil 1