Da ich im Moment mehr unterwegs als zuhause bin, musste ein noch kompakterer und handlicherer Copter zum fliegen her. Ich kann mit meiner Taranis zwar dank Mod Modul auch Hubsan FC´s ansteuern aber irgend wie gefällt mir da die Regelung nicht. Also hab ich mich mal kurz umgesehen und bin auf den Afromini Brushed ESC Umbau von der-Frickler gestoßen. Nach etwas Internet Recherche wusste ich dann auch wie es geht und was ich alles brauche 🙂
Afromini 32 Brushed ESC Umbau
Die benötigten Bauteile hatte ich eh zuhause also habe ich aus einer Afromini, einem Spektrum Sateliten und ein paar Bauteilen eine komplette copter Einheit (FC, RX, ESC´s) mit nur 4,3 Gramm Gesamtgewicht gezaubert 🙂
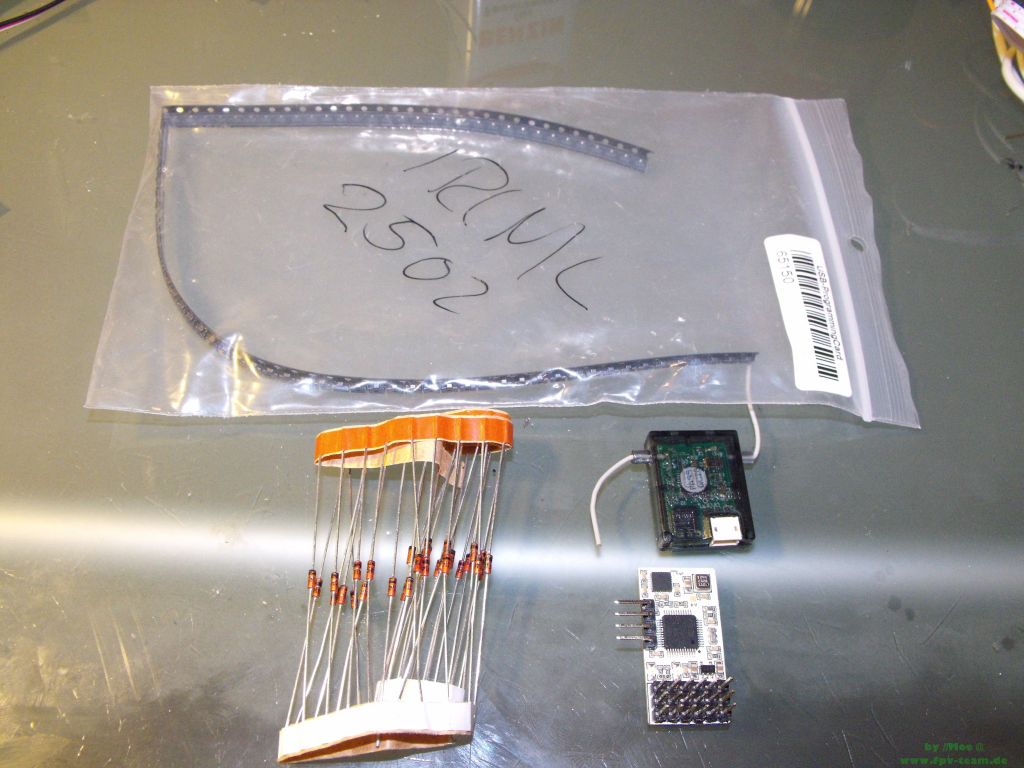
Benötigte Bauteile für den Afromini umbau:
- 1 x Afromini 32 (ich hab hier im Bild noch eine Rev.1 die ich von “Provotroll” bekommen habe, Danke nochmal!
- 4 x Dioden 1N4148
- 4 x Fet´s IRLML2502
- 1 x Spektrum Satellit (die Kopien von Orange etc. gehen auch super)
- Kabel und etwas Geduld
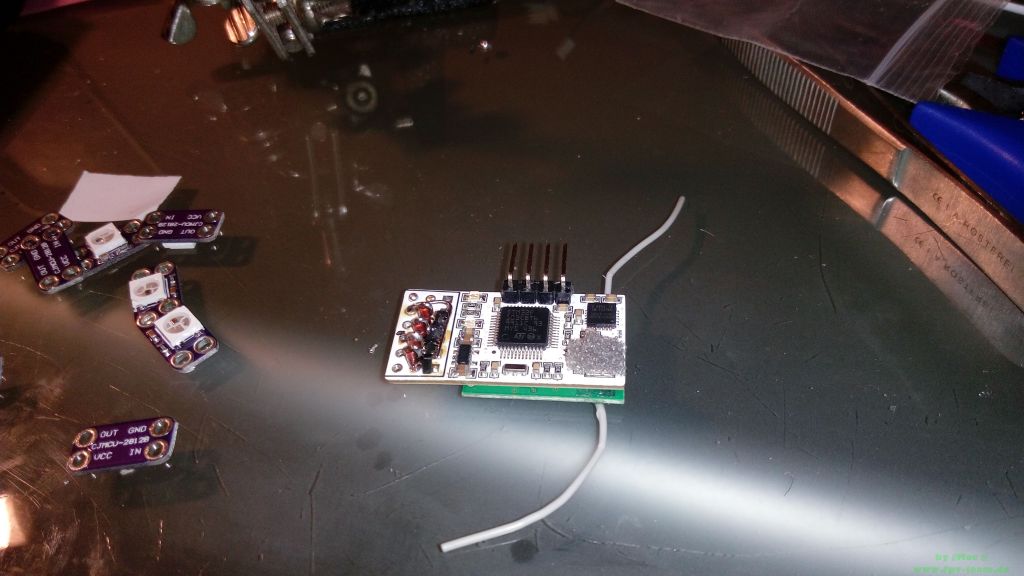
Als erstes habe ich die Afromini und den Satelliten mal vom Gehäuse und den Steckleisten befreit:

Anschließend hab ich die Dioden mit dem schwarzen Strich (Kathode) an den + Anschlüssen von S1-S4 verlötet. Anschließend die Anode gekürz und umgebogen das sie genau so steht, das der Drain anschluss des IRLML dort hin reicht.
Unbequemste Teil
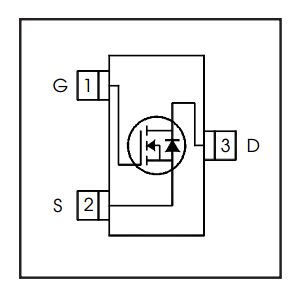
Als nächstes kommt der wohl pfrimeligste Teil, die FET´s stehend auf das Impuls Pad der FC löten (Das Gate muss auf das Impuls Pad). Hierbei ist eine sehr dünne Pinzette mehr als hilfreich. Wenn der Fet stehend verlötet ist, kann die Anode mit dem Drain des FET´s verlötet werden (hier ist etwas mehr Lötzinn zum Spaltenfüllen hilfreich).
Verdrahtung
Zu guter Letzt habe ich dann mit einem stück Restdraht der Dioden den Source Anschluss des FET´s mit dem Massepad der FC fliegend verdrahten.
Afromini 32 Brushed ESC Umbau
Jetzt ist die FC zumindest hardwaretechnisch schonmal mit Brushed ESC´s ausgerüstet. Fehlt noch die Anpassung in der Software. Ein kurzer Blick in das Wiki erklärt auch ganz simpel wie es geht 🙂
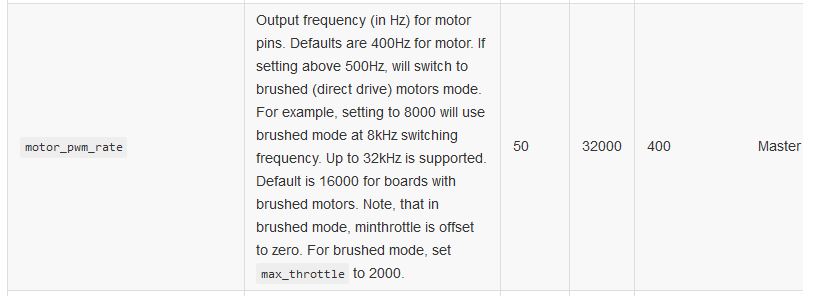
Motor PWM Rate
Cleanflight CLI
Einfach in Cleanflight im CLI folgende Befehle eingeben:
- set motor_pwm_rate = 16000
- set max_throttle = 2000
- save
Ich habe auch noch unter Configuration den Punkt Motor_stop aktiviert. Damit schützt ihr eure Fet´s und eure Motoren im Crashfall da ihr mit Gas auf 0 die Motoren still stehen und nichts abraucht. Außerdem muss das Servo Gimbal noch aktiviert werden, damit an S1-4 die 4 Motorimpulse ausgegeben werden.
Die Motoren werden dann mit dem + Pol unten am + Pad der FC und mit masse oben an der Diode (Anode) angelötet. Da der FET gegen Masse durchschaltet.
Spektrum Satellit
Nächster Schritt war den Spektrum Satelliten mit der Afromini zu verlöten.
Die Pinbelegung war bei mir folgendermaßen (von innen nach ausen)
- VCC (Achtung: hier MAXIMAL 3,3V!)
- GND
- IMP

Spektrum Satellit ohne Gehäuse
GND habe ich auf das Massepad unten an den Servoanschlüssen verlötet, VCC auf dem oberen Pin der Bootloader Pads und IMP habe ich auf das RX pad gelötet. Anschließend muss man in der GUI erst den 2. Seriellen Port auf Serial RX stellen und anschließend den Spektrum Sat als RX in den Einstellungen konfigurieren.
Nicht vergessen die Signalreihenfolge auf Spektrum einstellen, oder wenn ihr ne Taranis mit Spektrum Modul nutzt, einfach die Kanäle passend einstellen. Jetzt nur noch den Sat über die CLI binden und schon ist alles fertig für den Einbau.
Ich habe noch einen winzigen Spannungsteiler aus 2 x 10K 0603 Widerständen gelötet um die Akkuspannung zu messen, damit kann ich mir eine Akkuwarnung an meinen RGB LED´s anzeigen lassen. Außerdem habe ich noch 2 SMD Elkos in die Spannungsversorgung des Sateliten gelötet, da Spektrum sehr sehr anfällig auf Brownouts ist 🙂
Jetzt das ganze nur noch in den gewünschten Rahmen packen und ab gehts 😀