Bashy FPV Nuri Baubericht
Heute stelle ich Euch die Elektronik in meinem Bashy Nuri vor. Jeder Flieger wird individuell aufgebaut, somit ist das hier nur eine “Anregung” an Eure zukünftigen Komponenten. Dies ist der 3. Teil meiner Baubericht Serie über den Bashy. Teil 1 findet Ihr hier und Teil 2 hier.
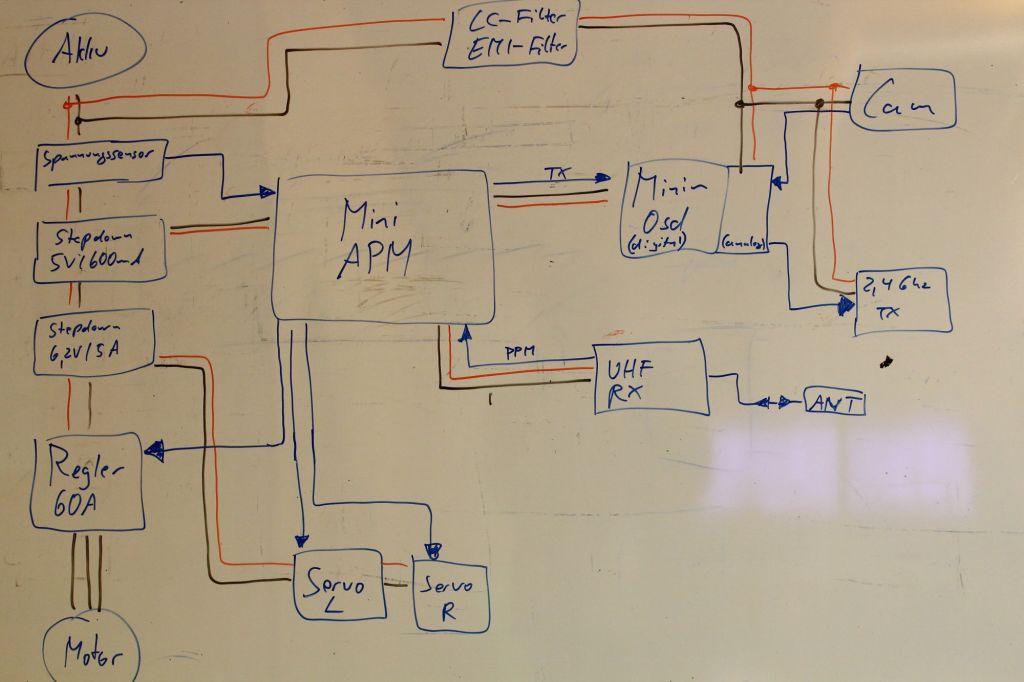
Das werkelt also im Innenleben des Bashy. Den Kern bildet der Mini APM. Dieser wird von einem seperatem Low-Noise Stepdown mit sauberen 5V versorgt. Somit hat man keine Störungen durch die Servos auf der Flightcontrol. Mit dem APM sind ein GPS, der UHF-RX und ein Minimosd verbunden und somit auch mitversorgt. Der UHF-RX gibt sein Signal via PPM an die Flightcontrol. Diese verarbeitet die Signale und steuert dann die 2 Servos und den Regler an. Einen Stromsensor habe ich nicht verbaut, dafür aber einen Spannungsteiler um die Akkuspannung anzeigen zu lassen.
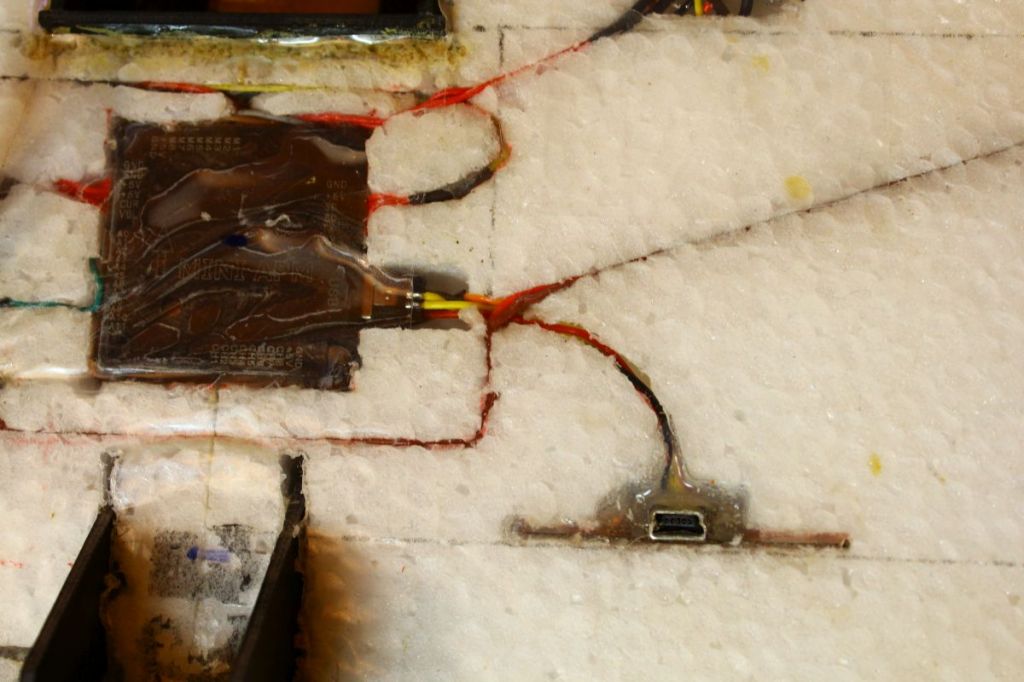
Damit sind wir dann auch schon fertig . Den APM habe ich zwischen Akkuhalter und Motorhalter verbaut. Dort liegt er schön auf der Rollachse und ist durch den Schaum weich gepolstert.
Wie euch aufmerksamen Lesern schon aufgefallen ist kommt man nun nicht mehr an den USB Port. Da die USB-Verbindung beim APM nicht empfindlich ist konnte ich eine einfache und stabile Lösung verwenden. Ich habe eine Mini-USB-Buchse auf ein Stück Kupferplatine gelötet und diese dann mit ungeschirmten Litzen mit dem APM verbunden. Die Platte mit der USB-Buchse habe ich dann mit Epoxy im EPP verklebt.
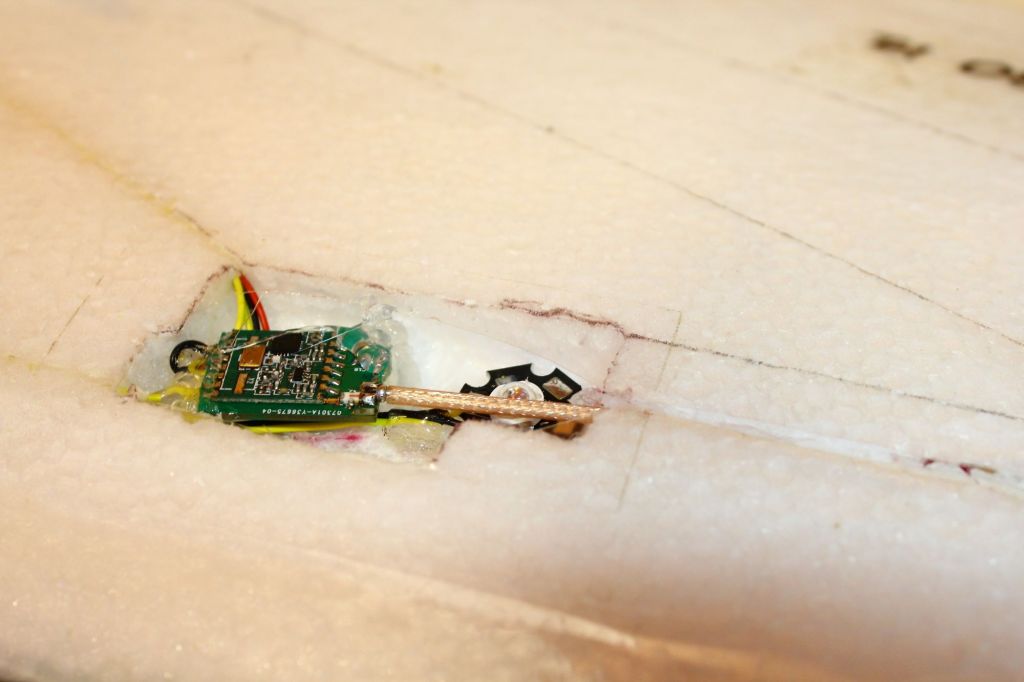
Dann ging es weiter mit dem UHF. Die Antenne habe ich ja schon in Part 2 vorgestellt. Nun habe ich den UHF-RX direkt mit dem Koaxkabel der Antenne verlötet und dann den RX mit Heisskleber fixiert. So können die Lötstellen nicht durch Vibrationen brechen. Die Kabelverbindungen sind alle fest verlötet. ich verabscheue unnütze Stecker, da diese nicht zur Ausfallsicherheit beitragen. Zusätzlich hat noch eine kleine High-Power-Led in dem Ausschnitt platz gefunden. Diese wird später für Nachtflüge kurz gepulst.
Das ganze wurde dann mit einem Aufkleber vor neugierigen Blicken geschützt 😉
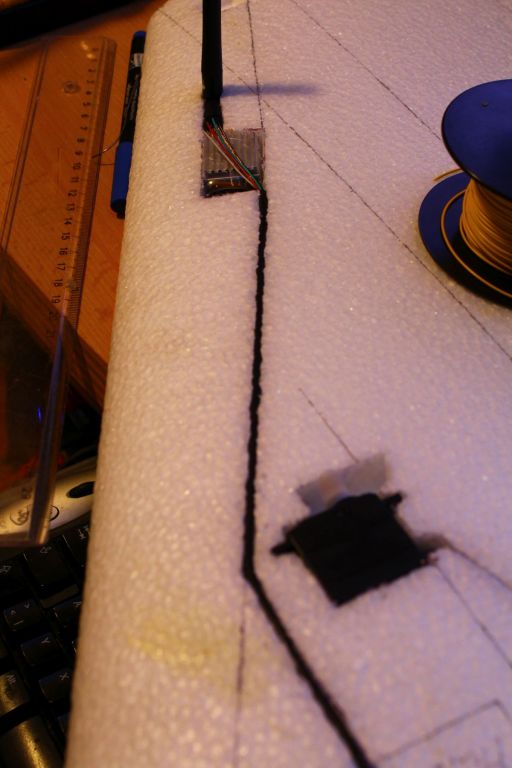
Nun zeige ich euch noch kurz mein Videosetup. Ich habe die Kabelwege zwischen den Videokomponenten möglichst kurz gehalten um Störungen zu vermeiden. Das Minimosd sitzt weich in Schaum gebettet neben der Akkubox
Direkt vor dem OSD befindet sich die Kamera. Diese wurde möglichst tief in das EPP eingelassen um sie gegen Beschädigungen beim harten Landungen zu schützen.
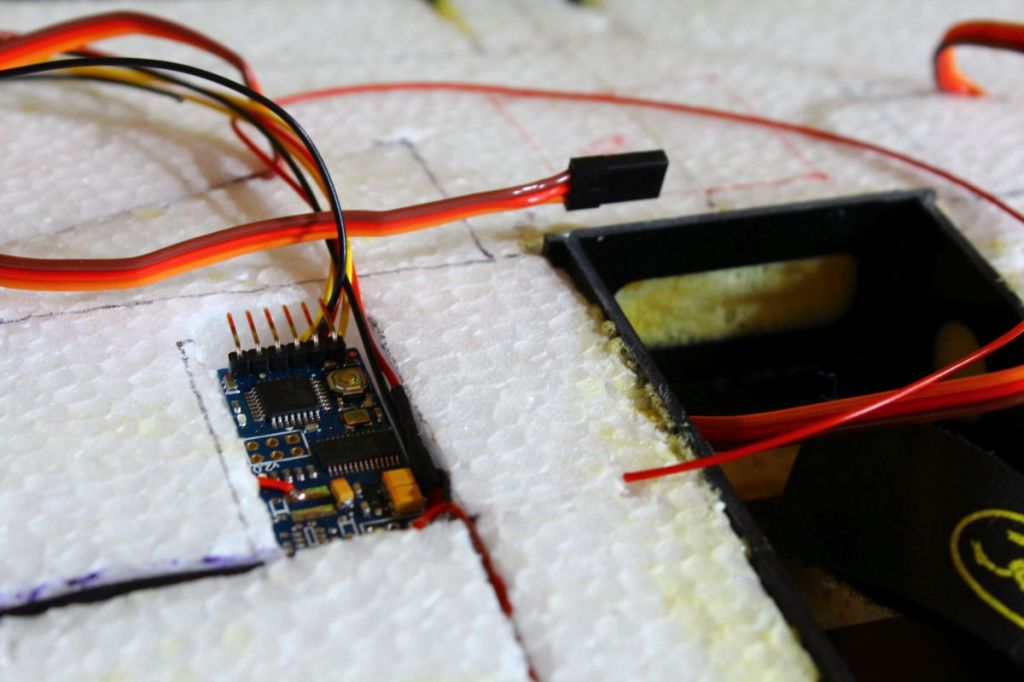
Der Videosender wird über ein USB Kabel mit Spannung versorgt. Der Schirm ist dabei einseitig geerdet um Störungen von der Videoleitung fernzuhalten. Wie immer wurde der Stecker am Sender nicht genutzt sondern die Leitungen alle fest an der Platine verlötet.
Alles in allem sieht die Verkabelung dann so aus
Nachdem die Komponenten versenkt wurden war laminieren dran. (Nicht wundern dass hier oben schon Bilder vom laminierten Zustand sind….wie schon gesagt sind leider die Bau-Bilder weg). Ich halte mich da seit meinem ersten Nurflügler an die Anleitung der Darkside Crew. Der einzige Unterschied ist dass ich meinen Nurflügler nicht mit Sprühkleber einsprühe sondern lediglich vor dem Laminieren gründlich mit Schleifpapier aufrauhe. Ich habe euch das mal hier eingebunden.
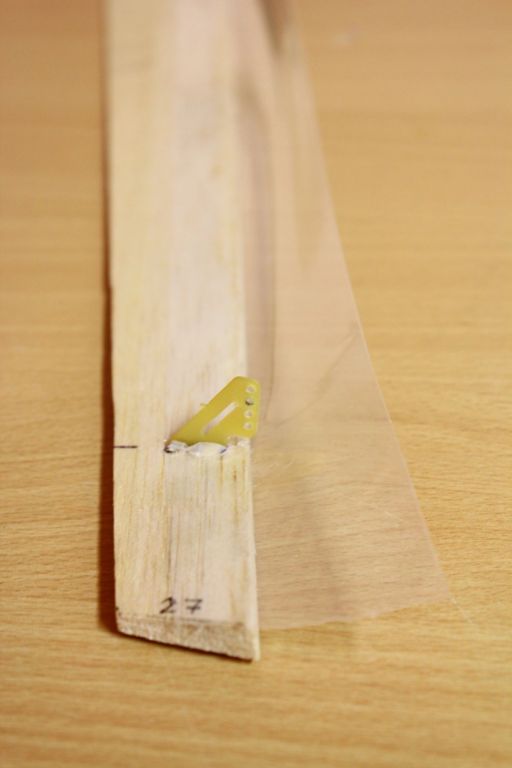
Nach dem Laminieren kommen dann die Ruder an das Modell. Es gibt viele Möglichkeiten ein Ruder anzuscharnieren. Bei mit hat sich nachfolgende Methode eingebürgert bei der sich manche Profis vor Entsetzen eventuell die Haare ausreißen werden. Aber sie ist äusserst stabil und zuverlässig.
Das Klebeband ist ein sehr zähes und dickes Tape das original von 3M hergestellt wird. Die originale Artikelnummer konnte ich aber noch nicht finden. Zuerst wird die Kante des Ruders mit Sekundenkleber eingestrichen. Das verhindert ein Ablösen des Klebebands bei harten Crashs.
Danach wird das Klebeband zur Hälfte am Ruder aufgebracht und gut festgestrichen.
Jetzt muss das Ruder nurnoch bündig mit der Kante am Nuri verklebt werden. Da mein Ruder nicht angeschrägt ist habe ich das EPP um 45grad angeschrägt damit das Ruder auch nach unten lenken kann.
Jetzt müssen nurnoch die Anlenkungen angebracht werden und das Ruder ist fertig. Nach den Rudern müssen noch die Winglets mit UHU-Por verklebt werden und der APM richtig konfiguriert werden. Genau das treibt sehr viele Anfänger auch regelrecht in die Verzweiflung. Der APM funktioniert super…..wenn er mal funktioniert. Daher habe ich euch als Orientierung mein Configfile hochgeladen das ihr direkt in den APM Planner im Parameter-Tab importieren könnt. Das ist nur eine Hilfe, keine Sorglos-Lösung! Selbst wenn ihr den Nuri 1 zu 1 von mir abgebaut habt müsstet ihr immer noch die Servowege und den Spannungsteiler kalibrieren.
Download hier: bashy_fpv_teil_3_parameter_apm.zip
Es wird noch einen vierten Teil mit Flugvideos und einigen Bildern im “Einsatz” des Bashy geben. Der Technikteil ist damit abgeschlossen.
Seit einer Weile bin ich nun auch unter den HD Piloten. Und vor kurzem hat…
Du suchst was gemütliches, einfaches, etwas zum runter kommen? Dann entschleunige! Mit dem Teksumo FPV…
Das neue Jahr starten wir mal mit einem kleinen Regelwerk für die kommenden Wingraces. Egal…
Wenn Du Deine QX7 startest, so erscheint bei der Standard-Firmware das originale „Open-TX“-Logo. Dieses Logo…
Viele FPV-Flächen-Piloten haben bereits über Sie gelesen aber wenige fliegen Sie. Meine Meinung: Ein echter…
Racecopter unter 250 Gramm sind eigentlich keine große Herausforderung. Man muss nur bestimmte Komponenten verwenden.…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}