Mittlerweile ist auch Eachine mit einem eigenen 250er Racecopter vertreten. Nachdem es diesen bei Banggood vor kurzem im Angebot gab, konnte ich nicht widerstehen. Das besondere an dem Angebot ist, dass quasi alles (incl. Ladegerät und Akku) dabei ist, er fertig montiert ist und das alles zu einem sensationellen Preis wie ich meine. Hier will ich Euch meine ersten Eindrücke von dem Miniquad kurz berichten. Von einem Baubericht will ich hier nicht sprechen 😉
Eachine Racecopter 250
Wo kann man ihn kaufen? Hier: Eachine 250
Lieferung und Inhalt
Paket kam aus den Niederlanden. Hat trotzdem ca 2 Wochen gedauert. Was bekommt man:
- Copter fertig montiert
- Videosender
- Antenne für Videosender
- OSD integriert
- 1x Akku 3S1500
- Ladegerät
- Props
- Schlüsselband „Eachine“ – Maulschlüssel für Props (aus Carbonplatte gefräst)
Alles zusammen im Schaumstoffblock, der sich auch gut zum Transport eignet.

Lieferinhalt des Eachine 250 Racecopter
Was fällt auf? Vor allem, dass schon alles dran ist, was so ein Racer braucht. Motoren, Regler, Controller, OSD, Kamera. Alles schon montiert. Man braucht also nur noch Videobrille, 5.8GHz Rx und Empfänger.

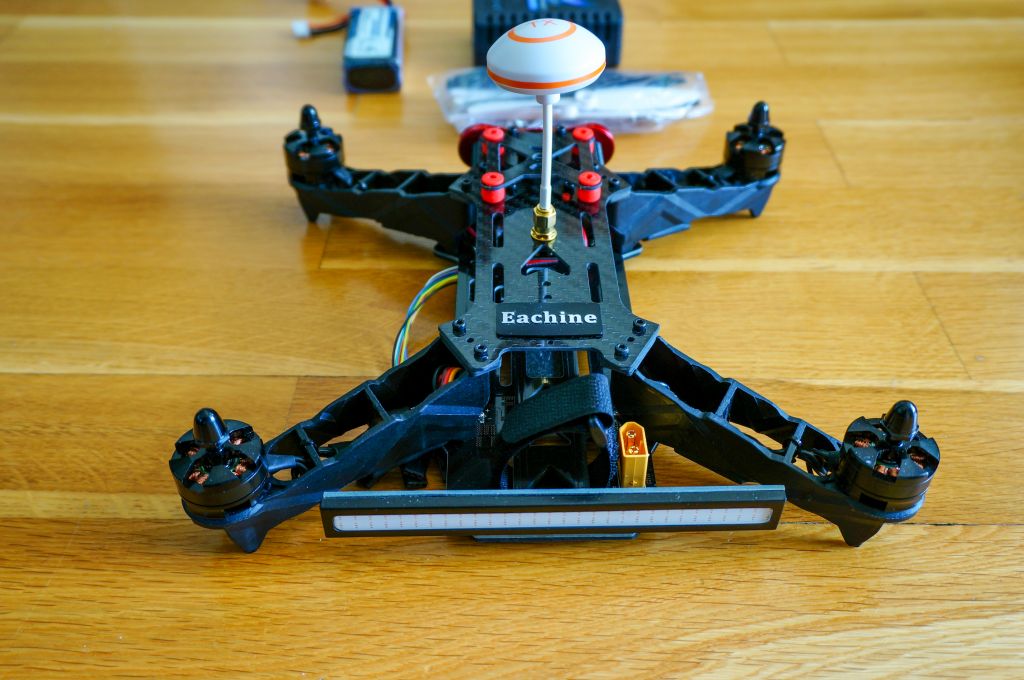
Frontansicht des Eachine Copters
Rückseite des Copters
Gewicht
So wiegt er 426g. Mit dem beiliegenden Akku sind es 560g.
Aufbau des Eachine Racer 250
[stextbox id=”alert”]Als erstes sollte man unbedingt die Antenne aufschrauben. Sonst grillt man den Videosender beim ersten Akku anschließen!![/stextbox]
Der Empfänger ist schnell angeschlossen. Ich nutze den Graupner Gr-12 mit PPM und schließe daher nur den Stecker für Kanal 1 (schwarz, rot, weiss) an. Bei PWM-Empfängern ist die Reihenfolge
- Schwarz-rot-weiss: Kanal 1 und Power
- Blau: Kanal 2
- Gelb 1: Kanal 3
- Grün: Kanal 4
- Gelb 2: Kanal 5
- Schwarz: Kanal 6
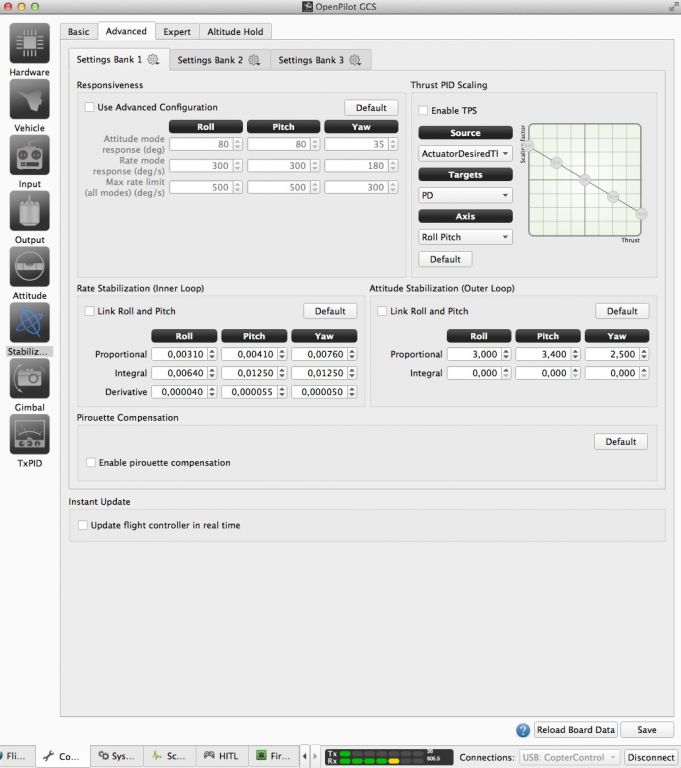
Damit ist der Copter auch schon fertig aufgebaut. Propeller werden logischerweise erst als letztes aufgeschraubt. Jetzt geht es an’s Controller einstellen. Verbaut ist ein CC3D. -> OpenPilot GCS runterladen: http://web.archive.org/web/20160405111226/https://www.openpilot.org/download/ (dabei unbedingt Version 15.02.02 wählen, die andere funktioniert nicht mit dem Board). Die Fehlermeldung bei der obigen Version hab ich ignoriert, ging trotzdem. Ich habe mal bewußt kein Update gemacht. Es sind schon Voreinstellungen geladen, die hab ich erst mal verwendet um zu sehen, ob er auch „out of the box“ fliegt.
Einstellungen der Software:
Ein Bild sagt mehr als Tausend Worte!





Was musste im GCS eingestellt werden:
- auf PPM umstellen
- Transmitter Setup Wizard und Knüppel kalibrieren
- unter RC-Input Kanäle zuordnen – Flightmodes einstellen (etwas missverständlich: „Attitude“ ist hierbei self level, „Rate“ ist manueller Modus)
- Arming musste eingestellt werden
- Regler musste ich noch einlernen, waren völlig ungleich kalibriert. (Das geht über die Funktion „Test outputs“. Vorher alle 4 über „Link“ verbinden. Dann Akku weg, die vier Schieber ganz nach rechts -> Akku dran -> auf die zweite Piepfolge warten und dann die Schieber ganz nach links -> auf Bestätigungspiepsen warten. Akku ab. Fertig.)
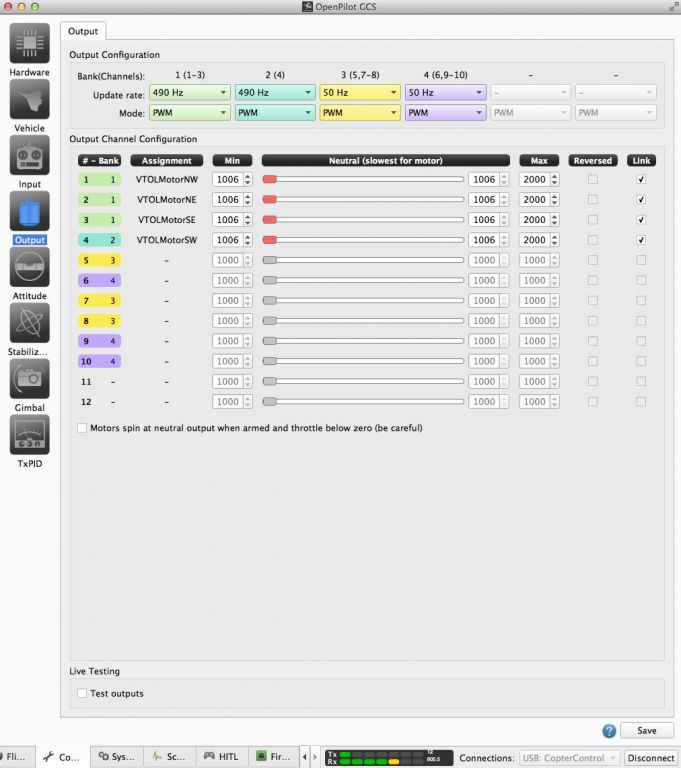
Setup 07
Fliegen:
Er fliegt mit den Standardeinstellungen und das garnicht mal soo schlecht. Gemütliches rumkurven geht, richtig zackig geht er so aber nicht ums Eck. Was man sofort merkt ist, dass er eher schwach motorisiert ist, bzw. recht schwer. Beim Abfangen bin ich ständig am Vollgas geben. Mir ist er mit den Standard PIDs zu „weich“ und nicht stabil genug. Fliegen kann man damit aber. Habe die PIDs also mal auf die Werte aus dem RCG Forum geändert, damit fliegt er sich viel besser!
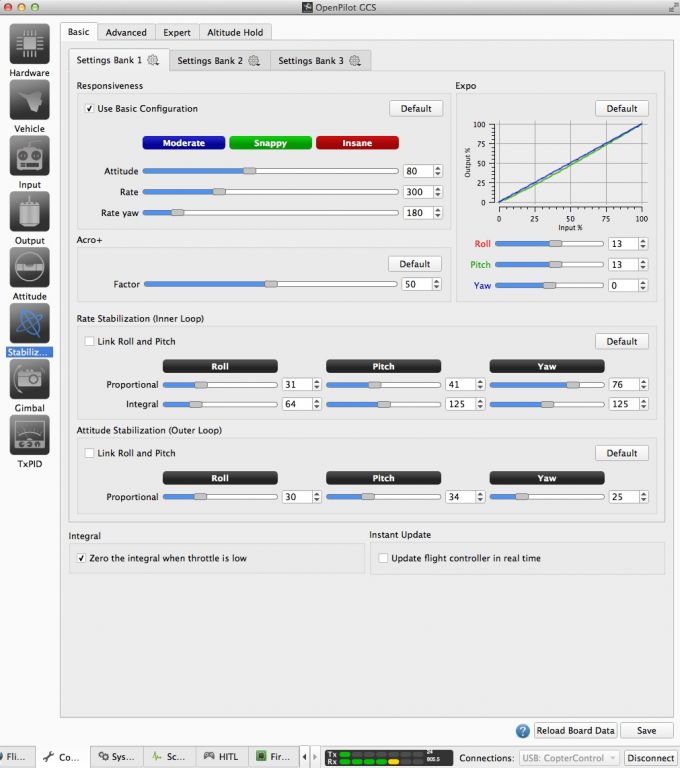
Setup 08
Setup 09
Was gibt es noch zu berichten?
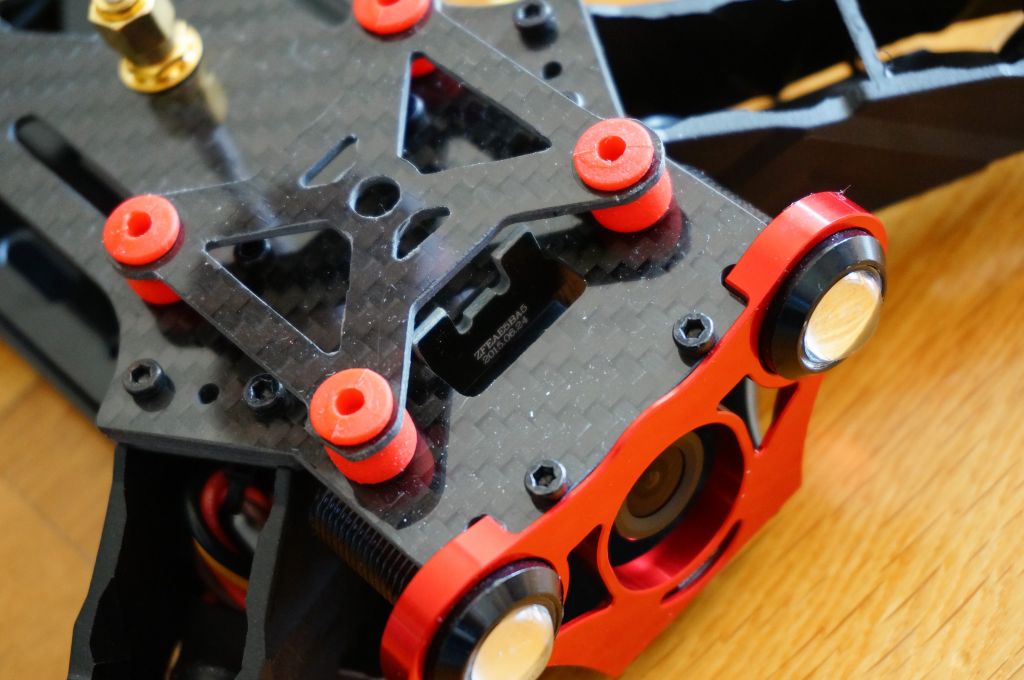
- Die Kamera kann leicht gekippt werden. Muss man mit Nachdruck verschieben, ist zwischen oberer und unterer Platte eingeklemmt. Eigentlich müsste man sie aber noch etwa mehr kippen können, aber da kann man ja noch etwas wegschleifen.
- Die LEDs vorne sieht man sehr gut auch bei Sonneschein. Die hintere wird im Wald besser zur Geltung kommen.
- Der Schwerpunkt stimmt ziemlich gut, ohne Mobius.
- Das OSD ist gut zu sehen, kann durch kurzen Druck auf den Kanal-Taster des Video-Tx etwas nach unten verschoben werden. Ich brauche es eigentlich nicht, ist jedoch praktisch, da es den aktuellen Kanal und die Akkuspannung anzeigt. Der Messwert ist 0,1V zu niedrig.
- Der Akku scheint mir nicht sehr Spannungsstabil zu sein. Werde ich beobachten.
- Das Ladegerät lädt den Akku über den Balancer-Anschluss. Es funktioniert. Gut ist, es lädt die Zellen einzeln, aber es braucht ewig (zw. 2-3h !!). Blöd: Nur US-Stecker dabei.
- die Unterseite ist mit Moosgummi beklebt. Extra Gewicht, aber angenehm (kratzt weniger ? )
- Motorlager haben erbärmlich viel Spiel. Bin gespannt wie langen die halten.
- Kamera muss ich noch bei starken Kontrasten testen, ebenso Reichweite Tx. Scheint aber im normalen Rahmen für 5.8 GHz zu sein.





Fazit
Günstiger Einsteiger-Quad der in einer Stunde flugfertig ist (nicht wenn man sich garnicht auskennt!). Für den Preis ein super Angebot, insbesondere wenn man nicht schrauben will. Das Ladegerät ist Mist.
Update:
- 6 zoll Props passen nicht
- mit 5045 hat er ein klein bischen mehr Power
- der Akku hält (neu) etwa 1 minute weniger als die hobbyking nanotec (gebraucht)
- seit einer kleinen “Bodenrolle” geht der hintere LED-Balken nicht mehr
- Kamera ist deutlich schlechter als die Sony 600 TVL. Aber das war bei einer CMOS ja zu erwarten.
Geplante Modifikationen
- Controller flashen auf Cleanflight
- Spannungswarnung über Telemetrie (wenn ich flieg, hab ich doch keine Zeit das OSD zu lesen 😉
- Betaflight auf die CC3D
Cleanflight/Betaflight auf die CC3D
Das wird in diesem Video hier beschrieben.
Sie sehen gerade einen Platzhalterinhalt von Standard. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
7 Kommentare
Ich habe den Eachine auch seit ein paar Tagen. Muss sagen, er lohnt sich wirklich. Vorallem als Drohnenanfänger ist er wirklich toll.
Fliegt sozusagen direkt nach dem Auspacken. Danke Bela für die Einstellungshinweise!
Habe ihn mir aufgrund der Rezension bei Banggood für 110.94 € auch gekauft. Für Anfänge perfekt, dazu noch eine billige Fernsteuerung evtl. Spektrum… Für das Geld eine super Investition!!!! Danke vielmals!
Geiles Gerät für den Anfang. Die Einstellungen mit 3S sind super. Nur mit 4S überschlägt er sich.
Bräuchte da mal Hilfe. Ich fliege sonst nur Heli und Fläche.
Hey Metzger, inwiefern überschlägt er sich? Schaukelt er sich auf und überschlägt sich dann? Dann stimmen Deine PID Werte nicht…
Mit 3s und obigen Einstellungen fliegt der Copter nicht schlecht.
Mit 4s ist er kurz nach den Start auf den Rücken gelandet.
Muss mich da wohl noch ein wenig rein lesen.
Weis noch nicht so recht wie ich die PID Werte ändern muss.
Ich habe mir als Anfänger ein Kit inklusive Fernsteuerung bei banggood bestellt und bin bisher begeistert. Auch für technisch versierte Einsteiger sehr gut zu fliegen, ich habe bis auf ein paar harte Ladungen keine echten Probleme gehabt.
Blöd ist, dass die Fernsteuerung bei RX so lange einen vollen Akku zeigt, bis sich der Copter nicht mehr steuern lässt und Höhe verliert. Aber auch diese Zeichen lernt man schnell zu deuten.
Mal sehen, wie die “Karriere” weiter geht. Bisher viel Spaß für wenig Geld.
Hi Florian,
find ich gut. Ich mag ihn auch sehr. Zwar kein richtiger Highpower Racer aber sehr sehr gut für den Anfang!