Da ich ja vor kurzem meinen Eachine E010 zum TinyWhoop 2.0 umgebaut habe, benötigte ich noch ein passendes Sendemodul für die Taranis. Es gibt da das NRF24 Multiprotokoll, welches für Eachine, Cheerson und andere Modell funktionert. Der Original Sender der dem Copter beiliegt geht zwar, aber genaues Fliegen bzw. irgendwelche Gates etc. sauber zu durchfliegen war mehr Zufall als kontrollierte Manöver.

NRF24 Multiprotokoll DIY Sendemodul für Eachine/Cheerson etc. Modelle
Beim RC Camp 2016 Stieß ich über Felix zum ersten Mal auf die Thematik Eachine H8 FC mit Acro-Mode Firmware. Das war genau das was ich gesucht hatte, eine Mini FC mit ESC und RX für unter 10€ mit Acro-Mode, Level-Mode, Flip Funktion etc… (Baubericht bzw. Flash Anleitung auf Deutsch kommt auch demnächst) Nur die Fernsteuerung fand ich absolut unpassend (die gleiche wie beim E010)
Über die Jungs vom FabLab Nürnberg erfuhr ich dann das es da schon eine fertige Lösung auf Basis eines Arduinos und eines NRF24 Moduls von einem Franzosen namens Goebish gab. Perfekt! Wieder zuhause hab ich mich dann erstmal auf die Teilerecherche gemacht.
Bauteile:
- Arduino Nano (wer es noch kleiner haben möchte kann auch einen Pro-Mini nehmen. Ich bevorzuge jedoch die Version mit USB Anschluss. Das macht Software Updates einfacher)
- NRF24 Modul (ich hab mich für das mit ~90mW Entschieden, es funktionieren auch die anderen Module, jedoch eben mit geringerer Reichweite. Wichtig ist zu schauen ob ein HF amp[2ter chip^^] auf der Platine vor der Antenne sitzt)
- 3,3V Festspannungsregler (Keinen Stepdown !! Die verursachen noise die beim Sender zu extrem komischen Verhalten führen kann)
- Buchsen Leiste (1,25) oder Kontaktbuchse (RAUSSUCHEN)
– 2x 10K Widerstand (Ich hab mir extra für solche Basteleien mal n Widerstandssortiment zugelegt, kann ich jedem nur empfehlen!) - J/R Schacht Modul bei Banggood für ca.5€ ohne Antennenbuchse
3D Drucker
Für alle mit 3D Drucker, Wärmt schon mal das Hotend auf 😀 Hier meine angepasste Version eines JR Moduls mit coolem FPV-Team.de Deckel! Ich habe das JR Modul angepasst, das es anstatt mit der Speziellen Kontaktbuchse mit einer einfachen Buchsen leiste auskommt. Man muss es zwar etwas vorsichtig einstecken aber da man das Modul ja nicht dauernd raus und rein macht geht das eigentlich echt gut. Außerdem habe ich eine Aussparung für die Mini USB Buchse und für das LowPower NRF Modul hinzu gefügt. Damit lässt sich alles schön sauber im Modul mit etwas Seppfix (aka. Heißklebe) fixieren.
Fertiges NRF24 Modul kaufen
Gleich mal vorweg: Goebish verkauft auch fertige Module inkl. Service und Support zu nem echt fairen Kurs für Handarbeit (~32€). Für alle Bastler die keinen Bock auf Freiluftverdrahtung haben gibt’s auch schon eine fertige Platine auf OSH Park: NRF24 Multipro bei Oshpark
Selbstbau
Ich hab mich für Selbstbau entschieden weil ich einfach so gern bastle und keine Lust hatte noch länger auf die Platine bzw. das fertige Modul zu warten. Ich wusste zu dem Zeitpunkt noch nicht das Goebish Franzose ist ^^ hatte angenommen das Modul käme dann aus USA.
Sketch
// ############ Wiring ################
#define PPM_pin 2 // PPM in
//SPI Comm.pins with nRF24L01
#define MOSI_pin 3 // MOSI - D3
#define SCK_pin 4 // SCK - D4
#define CE_pin 5 // CE - D5
#define MISO_pin A0 // MISO - A0
#define CS_pin A1 // CS - A1
#define ledPin 13 // LED - D13
da das NRF24 Modul nur 3,3V Verträgt müssen wir einen Festspannungsregler davor schalten, damit wir ihn nicht an den 6V grillen. Außerdem müssen wir das PPM Signal am Ausgang der
Taranis noch mit einem Widerstand von 10V (Akku Spannung) auf ca. 5V bringen.
Bauteile verbinden
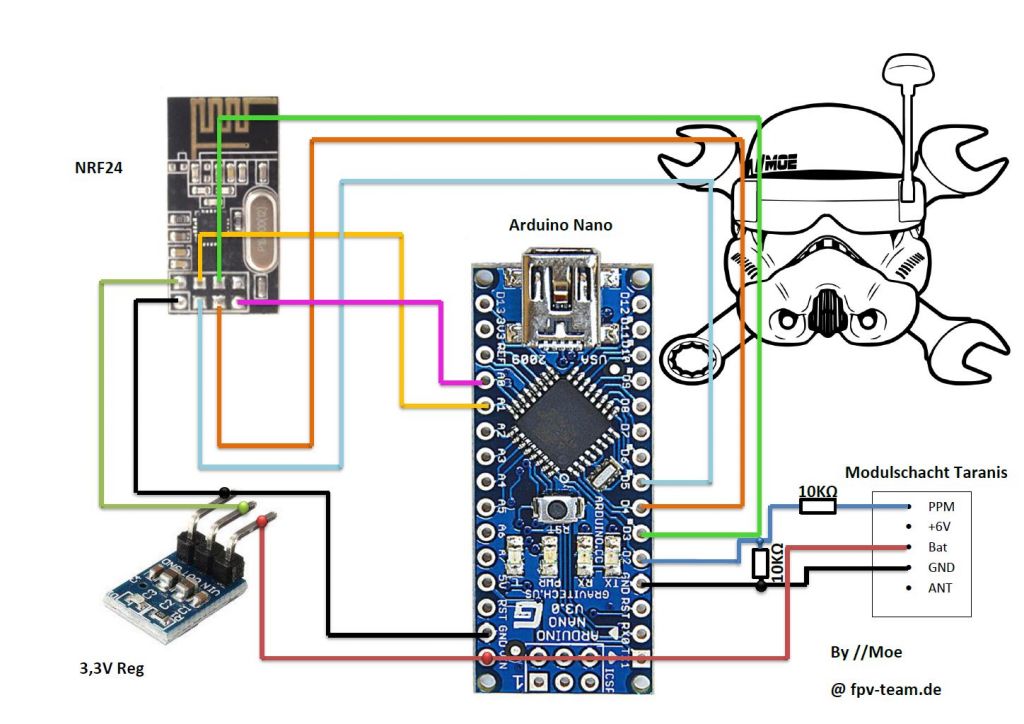
Schema-TX-Modul
Testaufbau:



Zum Schluss den Sketch auf der Projektseite von Github runterladen (oben links auf Download ZIP klicken)
und mit der neuesten Arduino Version compilieren und auf euren Arduino Flashen.
– Sketch öffnen (doppelklick auf die .ino datei)
– Board auswählen (wenn ihr den aus dem Link gekauft habt, Arduino Nano)
– COM Port auswählen
– Hochladen drücken
Ihr werdet feststellen wie viel Besser die kleinen Copter gleich fliegen wenn man eine ordentliche Fernsteuerung in der Hand hat 🙂
Spektrum Fernsteuerung
Für alle die es an einer Spektrum Fernsteuerung nutzen wollen, einfach einen Akkustecker an den Arduino und PPM und GND auf die Trainerbuchse an der Fernsteuerung. Außerdem im Sketch vor dem Compailieren im nrF24_Multipro Sketch in Zeile 62 die “//” löschen (auskommentierung entfernen)
Die verschiedenen Protokolle lassen sich beim Einschalten durch verschiedene Stick-Commands auswählen (Vorausgesetzt, die Kanäle des Trainerports gehen richtig über PPM raus!! Siehe Kanalordnung!) :
Hinweis: Bei der Taranis wird der Modulschacht und das PPM Sighnal erst nach dem Bootscreen freigeschaltet bzw. mit Spannung versorgt.
Wenn beim Einschalten die Knüppel in Neutralstellung stehen, wird das zuletzt angewählte Protokoll verwendet.
- Seitenruder Rechts + Querruder Rechts + Höhenruder Runter = Eachine E010, NiHui NH-010, JJRC H36 mini
- Seitenruder Rechts + Querruder Rechts + Höhenruder Hoch = FQ-777-124 Pocket Drone
- Seitenruder Rechts + Querruder Links + Höhenruder Hoch = CX-10 older red PCB/CX11/CX205/CX30,JXD389/391/393, SH6057/6043/6044/6046/6047, FY326Q7, WLToys v252 Pro/v343, XinXun X28/X30/X33/X39/X40
- Seitenruder Rechts + Querruder Links + Höhenruder Runter = WLToys V930/931/939/966/977/988
- Seitenruder Rechts + Höhenruder Runter = HiSky RXs, HFP80, HCP80/100, FBL70/80/90/100, FF120, HMX120,WLToys v933/944/955
- Seitenruder Rechts + Höhenruder Hoch = Syma X5C (älteres Modell), X2
- Seitenruder Rechts + Querruder Rechts = MJX X600
- Seitenruder Rechts + Querruder Links = Eachine H8 mini 3D, JJRC H20/H22
- Höhenruder Runter + Querruder Links = Syma X5C-1/X11/X11C/X12
- Höhenruder Runter + Querruder Rechts = Attop YD-822/YD-829/YD-829C
- Höhenruder Hoch + Querruder Rechts = Eachine H8(C) mini, BayangToys X6/X7/X9, JJRC JJ850, Floureon H101
- Höhenruder Hoch + Querruder Links = Eachine H7
- Höhenruder Hoch = WLToys V202/252/272, JXD 385/388, JJRC H6C, Yizhan Tarantula X6
- Höhenruder Runter = Eachine CG023/CG031/3D X4
- Querruder Links = Cheerson CX-10 grüne pcb
- Querruder Rechts = Cheerson CX-10 blaue pcb & einige neuere rote pcbs, CX-10A, CX-10C, CX11, CX12, Floureon FX10, JJRC DHD D1
Das Modell in eurer Taranis sollte dann 12Ch, PPM Out im Modulschacht und GQHS (TAER) als Grundeinstellung haben.
Mischer Taranis
Die Mischer bei der Taranis sollten dann Folgendermaßen aussehen:
- GAS
- QUERRUDER
- HÖHENRUDER
- SEITENRUDER
- AUX1, // (CH5) led beleuchtung, oder 3 pos. schalter am CX-10, H7, or invertierter Flug beim H101
- AUX2, // (CH6) flip control
- AUX3, // (CH7) Foto camera (snapshot)
- AUX4, // (CH8) video camera
- AUX5, // (CH9) headless mode
- AUX6, // (CH10) calibrate Y (V2x2), pitch trim (H7), RTH (Bayang, H20), 360grad flip mode (H8-3D, H22)
- AUX7, // (CH11) calibrate X (V2x2), roll trim (H7)
- AUX8, // (CH12) Reset / Rebind
Hinweis: Ich habe weder die Software noch die Hardware zu diesem Projekt erstellt! Das war alles Goebish bzw. andere. Ich habe es nur nachgebaut und hier für alle die kein Englisch können in Deutsch dokumentiert.
3 Kommentare
Hallo,
Danke für den Beitrag
ist es möglich noch ein Paar kurze Tips zur Programmierung des Arduino zu geben?
Also Hard- und Software zum Arbeiten mit PC (Win10 )
Vielen Dank
Andreas
Ich will mir so ein Ding auch bauen, nachdem 2 fertige Module von Banggood nicht funktionieren. Jedoch habe ich keine Taranis, sondern eine alte MC24.
Nun die Fragen: Wie müssen die PPM Pulse sein? Die veränderlichen Anteile HIGH oder LOW ?
Servo-Revers: Ich weiss nicht, wie die Taranis tickt, aber was ist korrekt:
Voll rechtsRudder 1000ms oder 2000ms?
Voll rechts Aileron 1000ms oder 2000ms?
Voll Höhe (Knüppel zu mir) 1000ms oder 2000ms?
Hallo,
gibt es auch eine möglichkeit die Visuo ex809hw mit diesem Modul zu verbinden ?
für die Eachine H8 funktioniert das sehr gut.
Viele Grüsse Ulli