Roll_E - mein Begleiter auf unliebsamen Gelände :)
Nun mal ein Baubericht, der nicht allzuviel mit FPV zu tun hat, sondern mit einem Elektro Rollstuhl. Vielleicht verpass ich ihm ja auch noch eine Kamera 😉 Beim letzten FPV Treffen konnten wir mit den Autos nicht ganz bis zum Flugplatz fahren und ich musste sage und schreibe 3x laufen bis ich alles ausm Auto an meinem Platz hatte. Ich war bevor das entspannte fliegen los ging schon regelrecht ent-nerft. Am Abend musste dann wieder alles ins Auto.
Als ich dann so den Weg zum Auto schlenderte, kam mir die ultimative Idee: ich brauche einen Bollerwagen! OK. Bollerwagen schön und gut, der muss ja auch gezogen/geschoben werden und dann durch das hohe und oftmals auch feuchte Gras. Was macht man da am besten? Richtig! Einen E-Motor verbauen!
Mit der Zeit kamen dann ganz viele Ideen was der Roll-E haben muss. Darunter zählen unter anderem:
Als besondere Gimmicks sind mir spontan eingefallen:
Somit ging die Recherche los und bin nach etwas googlen dann auf den Youtube-Kanal von CGmerowinger aufmerksam geworden. Lange Rede, kurzer Sinn, die Gegebenheiten standen fest und nach der Ideenfindungsphase war klar was benötigt wird. So ein Rollstuhl kann anscheinend um die 150KG schieben. Das wäre ja mehr als ausreichend 🙂
Nachdem ein paar Wochen vergangen sind, hab ich endlich einen passenden “Freund” in einer Kleinanzeigenbörse gefunden der mir zusagt… Einen INVACARE G40. Der Preis war auch vollkommen OK! Lasst euch nicht übers Ohr hauhen. Für die alten Rollstühle gibt es keine Ersatzteile mehr und fahren möchte den auch keiner mehr! 🙂
Da stand er nun ein paar Tage in meinem Keller, bis ich dazu gekommen bin ihn vom unnötigen Ballast zu befreien:
Abgenommen wurde der komplette Sitz mit Sitzmechanik, Aussenverkleidung, Fußstützen, die Elektronik und die Lampen. Die Batterien die mit dabei waren kamen auch sofort auf den Sondermüll. Die lagen beide bei 0,00V – somit Tiefentladen und reif für die Tonne.
Übrig geblieben ist dann nur noch der Grundrahmen und der komplette Antrieb mit Getriebe. Interessant ist auch die Lenkung. Die befindet sich bei diesem Rollstuhl an der Rückseite und erinnert an einen Stapler. Wohl das man sich keine Füße einzwicken kann. Die Lenkung wird mit einem Servomotor angesteuert. Mal sehn ob ich den zum laufen bekomme…
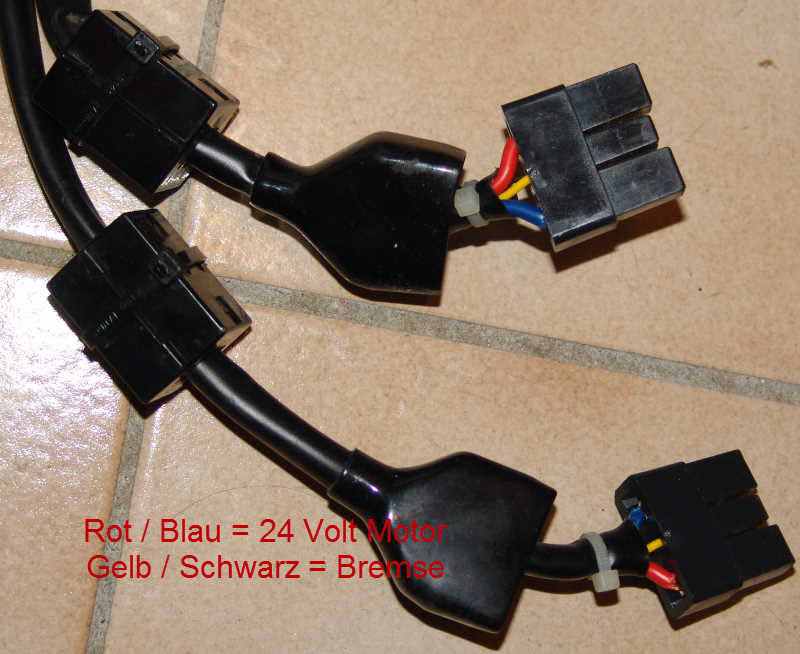
Da der Roll-E eine Magnetbremse besitzt, ist der Zustand ohne Akku natürlich immer “geschlossen”. Die muss man erst öffnen. Dazu nimmt man eine Batterie mit 12V und geht damit an den Bremskontakt. Man hört wie sich die Bremse öffnet mit einem kleinen “Klick”. Jetzt kann man den Reifen einwandfrei bewegen. Ich weiß, 24V will der Rolli haben, aber für die Bremse reichen ihm erstmal 12V. Jetzt nimmt man eine zweite Batterie und geht damit an die anderen beiden Pole im Stecker und siehe da, der Motor funktioniert 🙂
Die Scheibenbremse welche verbaut ist, lass ich erst mal ohne Funktion. Um die kümmere ich mich später 🙂 Wird wohl ausgebaut um Gewicht zu sparen!
Für den Elektromotor vorne habe ich diesen 24V Brushed ESC/Regler verbaut (hier, oder hier (nicht mehr lieferbar!)). Ich habe noch einen extra Kühlkörper verbaut um ihn auch wirklich nicht überhitzen zu lassen.
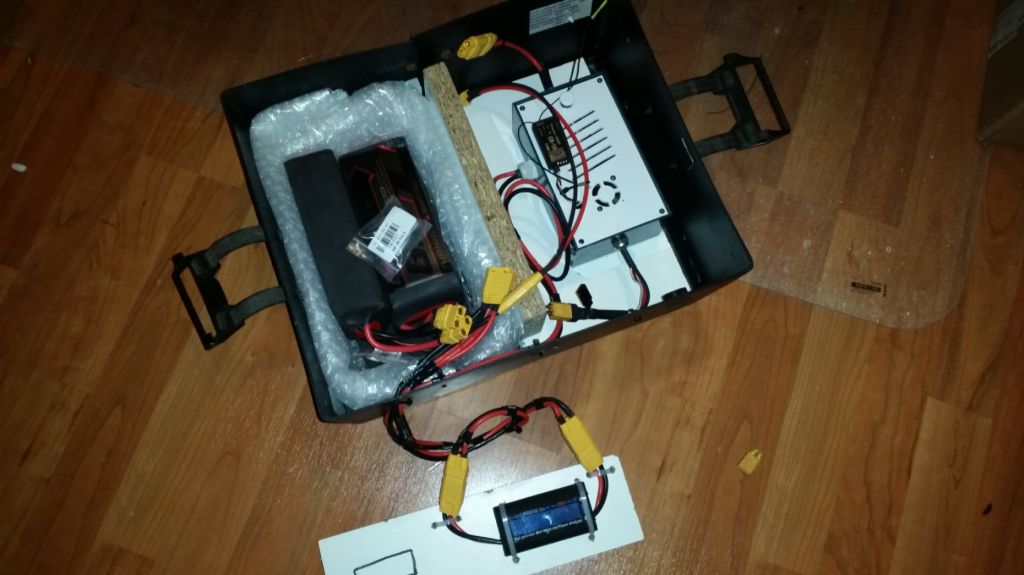
Die Akkukiste die beim Rollstuhl dabei war, dient mir nun als Controllingeinheit. Sie umfasst eine Box welche ich mit Elektronik vollgepackt habe und die Akkus natürlich.
Nachdem ich mich lange damit beschäftigt habe, wie ich die vorhandene Lenkung richtig anspreche (Arduino, Positionsgeber, Software) hab ich die Idee mit dem Arduino verworfen und hab mich dann nochmal länger damit beschäftigt… Die vorhandene Servolenkung von dem Ding ließ sich einfacher ansprechen als Gedacht. Benötigt habe ich dazu nur folgende Sachen:
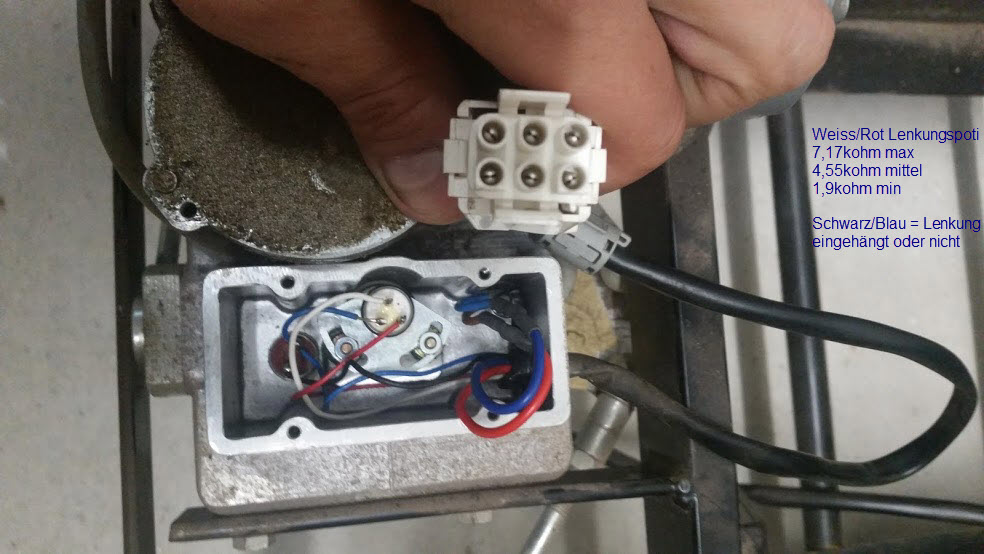
Auf der Lenkseite (hinten im Originalzustand) hat der Rolli einen Schalter um die Lenkung auszuhängen. Das ganze wird durch einen mechanischen? Schalter übermittelt ans Steuergerät. Ich konnte somit feststellen ob die Lenkung eingehengt ist oder nicht mit einem Durchgangsprüfer. Auch konnte ich werte des integrierten Positionsgebers auslesen.
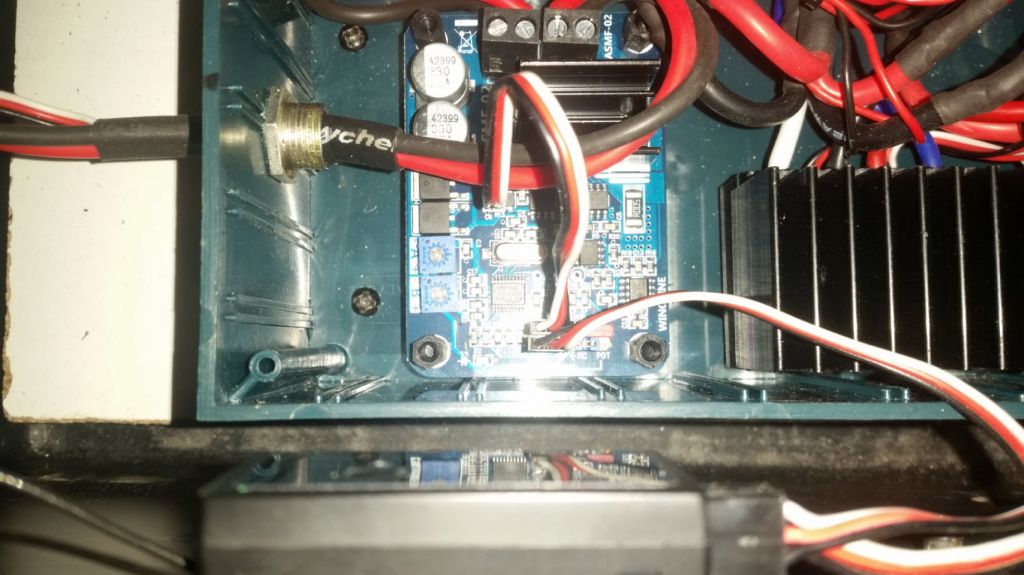
Die Verkabelung für das Servocontrollerboard sieht dann wie folgt aus:
Am Positionsgeberpoti vom Rollstuhl ist die Verkabelung folgend:
Der Controller kann entweder per Poti angesteuert werden oder aber über ganz normales RC Signal 🙂 Da kommt freude auf!! 🙂
Dazu habe ich auch folgendes Video gefunden bei Youtube:
Zur Signalisierung, dass der ROLL_E unter Strom steht, hab ich auf der Rückseite einen Streifen mit roten LED’s angebracht. Das sind normalerweise RGB Leds, hatte aber keine Lust jetzt extra “Rote” LED Streifen zu besorgen. Sobald der Powerschalter umgelegt wurde, fangen die hinteren LED’s an zu leuchten. Vorne habe ich weiße LED’s verbaut.
An der Vorderseite habe ich weiße LED Scheinwerfer angebracht. Genau genommen diese hier: LINK Dazu hab ich ihnen eine Hutze gedruckt 🙂
Schaltbar natürlich mit Fernsteuerung durch diesen RC Schalter. Gibts mit Sicherheit auch bei ebay… Die Ausleuchtung der LED Scheinwerfer ist echt gigantisch. Bin ja mal gespannt, wie das ganze in der Dämmerung aussieht…
Kurzübersicht der verbauten Teile:
Da der Motor und die Servolenkung nur ordentlich mit 24 Volt laufen, musste ich einen Kompromiss eingehen… Sackschwere Bleigelakkus oder teure Lipo Akkus. Naja, ich hab mich dann für die Lipo Akkus entschieden. Das macht locker 20KG Gewichtsunterschied aus.
Um die einzelnen Lipozellen zu überwachen ist es notwendig jeden Akku mit einem Lipowarner auszustatten. Das ist schon recht nervig, aber hilf m.e. nichts. Da such ich noch eine Gesamtspannungsüberwachung. Mal schaun. Vorerst muss ich bei der Methode bleiben.
Um den Verbrauch, die Spannung und die Leistung zu verfolgen hab ich ein Wattmeter eingebaut. Genauer genommen das hier. Ein Test bei Youtube zeigt das es doch “relativ” genau ist und für meine Zwecke vollkommen ausreichend.
Weiterhin habe ich etliches an 12AWG Stromkabel bestellt und XT90 Stecker. Die sind vielleicht etwas überdimensioniert aber da passt das Dicke Kabel echt gut rein! Um alles ordentlich Einschalten zu können, hab ich noch einen Batterietrenner bestellt. Den hier um genau zu sein.
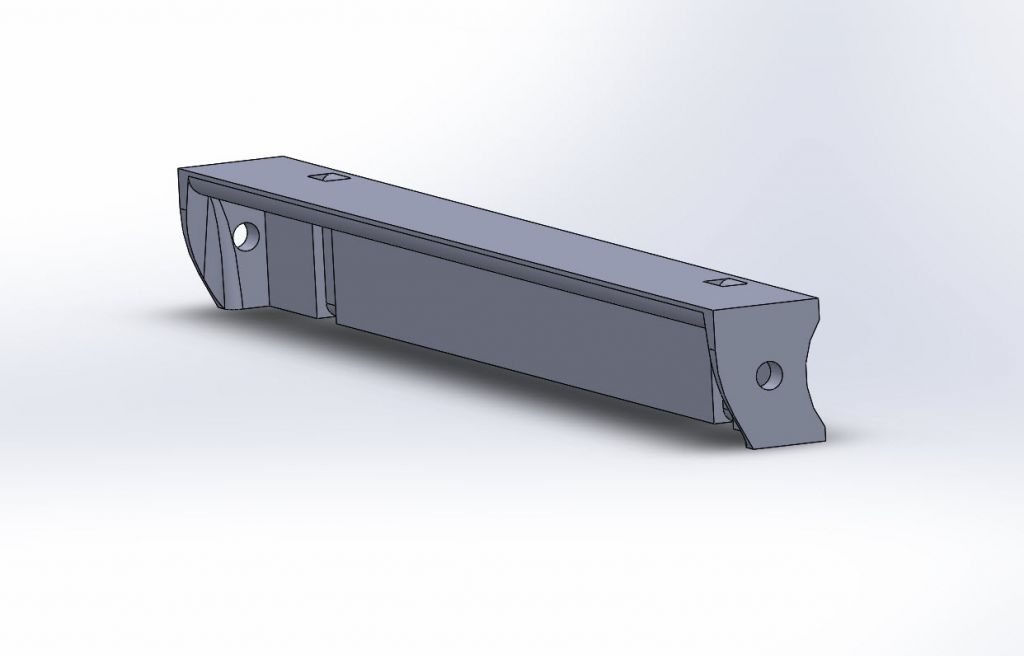
Ich habe das ganze natürlich auf einer schönen Blende samt dem Batterieschalter verbaut. Wenn kein Strom auf dem Roll_E ist, rollt er auch nicht davon 🙂
Ich wollte flexibel bleiben. Ausserdem muss der ROLL_E in meinen Kofferraum passen. Somit entschloss ich mich nur den Unterbau fahrbar zu gestalten und die Aluboxen abnehmbar zu machen.
BILDER FOLGEN
Auf das Grundgestell kamen zwei Riffelblechplatten mit Scharnieren um an die Elektronik hinzukommen und rundherum Aluwinkel in passender Länge/Breite und schon war der ROLL_E nicht mehr hohl, sondern man konnte etwas abstellen. Damit die Koffer nicht herunterfallen, hab ich noch jeweils zwei Schnappverschlüsse drangeschraubt.
BILDER FOLGEN
Verbaut hatte ich dann:
Um an die Motorelektronik / Steuerkasten heranzukommen, hab ich beide Deckelhälften zum abnehmen gebaut. Somit komm ich jederzeit an die Steuerelektronik und die Akkus. Die müssen ja immer schön entnommen und geladen werden. Ausserdem ist die Elektronik so vor äußeren Einflüssen geschützt.
Damit der ROLL_E nicht den ganzen Tag umsonst in der Sonne steht, hab ich mir überlegt, ich könnte die Aluboxen mit Solarpanels ausstatten. Das kann den internen Bleigelakku schön bei Laune halten. Viel wird nicht dabei herumkommen, aber damit kann ich immerhin die Elektronik und meine Groundstation die im ROLL_E Platz gefunden hat versorgen. Erste Versuche stehen noch aus… Nebenbei kann man noch praktisch sein Handy / Tablett daran laden 🙂
Gekauft habe ich folgendes:
Da der fahrbare Unterbau doch recht groß ist, hab ich mir überlegt ob ich in der Mitte ein kleines Stück herausnehme… Na mal drüber nachdenken!
Mir kam beim suchen nach einem Rollstuhl schon in den Sinn, der kleine könnte sich doch auch mal bisschen selbstständig betätigen… Selbst zum Autofahren, hinter mir her fahren usw… Dazu benötigen wir natürlich einen “Autopiloten”. Die Flieger unter uns kennen ihn sicherlich. Den APM / Pixhawk. Ich hatte die Wahl zwischen dem APM 2.5 und einem Pixhawk. Das Problem beim APM ist das er leider nicht mehr weiterentwickelt wird. Somit fiel die Wahl auf den Pixhawk. Da ich schon etliche Erfahrung habe bei der Konfiguration mit dem APM sollte der Pixhawk, da er ja der Nachfolger ist, kein Problem darstellen. Also hab ich alles bestellt, was ich benötigte:
Seit einer Weile bin ich nun auch unter den HD Piloten. Und vor kurzem hat…
Du suchst was gemütliches, einfaches, etwas zum runter kommen? Dann entschleunige! Mit dem Teksumo FPV…
Das neue Jahr starten wir mal mit einem kleinen Regelwerk für die kommenden Wingraces. Egal…
Wenn Du Deine QX7 startest, so erscheint bei der Standard-Firmware das originale „Open-TX“-Logo. Dieses Logo…
Viele FPV-Flächen-Piloten haben bereits über Sie gelesen aber wenige fliegen Sie. Meine Meinung: Ein echter…
Racecopter unter 250 Gramm sind eigentlich keine große Herausforderung. Man muss nur bestimmte Komponenten verwenden.…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
View Comments
Sehr schöner Baubericht, interessant wäre wie er sich im Winter auf Schnee macht, der Hintergedanke ist, das man ihn multifunktional gestalten könnte, und im Winter einen Ferngesteuerten Schneeschieber hat.
Ansonsten sehr geile Idee.
Hi Krussi,
danke für das Lob :) Ich glaube nicht, dass er sich so wie er ist eignet für Schneeräumarbeiten aber die Idee ist gut! Im Endeffekt kann der Rahmen für jede beliebige Idee genutzt werden - Schweißapparat vorausgesetzt - Gewicht auf der Hinterachse hätte er genug (um die 28KG). Man müsste ihm evtl. Traktorreifen oder besser noch Spikes verpassen!
Hallo!Habe mir den Antrieb eines G40 geholt und hätte mal ein paar Fragen! Wäre nett wenn sie sich mal melden könnten?! Mfg Alex
Hi Alex, was sind es denn für Fragen?
Meld dich doch mal auf meiner e-mail
king_of_the_ring@gmx.net
Wäre cool wenn du mir helfen würdest!
Geht zum einen um das anschließen der batterien beide an einen stecker in reihe oder an jeden stecker eine batterie? 2Autobatterien sollten eine Strecke hslten oder? Und noch mehr...XD
Und zwar gibt ja zwei stecker vom motor wie auf dem bild an jedes eine batterie oder beide in reihe an einen?bin laihe:) hab mir jetzt einen controller für 24V 500W +gasgriff für geschwindigkeitsregelung bestellt das ist ok oder?
Werde wohl 2 autobatterien mit 75ah benutzen sollte ja etwas reichen!?wäre cool wenn man sich mal per e-mail oder so kontaktieren könnte mir fällt bestimmt noch was ein XD und DANKE schonmal
king_of_the_ring@gmx.net
Das wäre evtl. auch interessant für andere Leser ;)
Aber ja, zwei Autobatterien mit jeweils 12V musst Du in Reihe schalten um 24V zu bekommen! Von wie viel Ah reden wir? So 20 Ah pro Batterie sollten es schon sein. Strecke geht damit schon einiges. Allerdings verlierst Du auch viel wegen dem hohen Gewicht! Und umkippen darf er Dir nicht, da sonst die Säure ausläuft...
In reihe und dann an "den einen Stecker" mit dem ich ihn ja schon hab laufen lassen!??
E-mail damit ich auch mal n bild schicken kann etc;)
Und den bürstenmotorcontroller für geschwreg. Zwischen batterie und motor!?ich weiß sind dumme fragen hehehe
Hab bisher nur eine mit 75ah glaube
Ja klar an den einen Stecker :) beide Batterien sozusagen an den einen Stecker! Es kommen ja dann 24V aus dem Batteriepack. Schreib einfach ne email an post(at)fpv-team.de
E mail ist irgw ungültig...
Eine Sicherung hinter die batterien wa?!was für eine🙈
Versuchs nochmal post@fpv-team.de
Ich habe bisher noch keine Sicherung verbaut aber würde so ne 20A Sicherung nehmen.
Hi, ja mich würde das auch zum Beispiel interessieren wie das mit den Akkus abläuft!
Hallo, tolle Idee.
Ich überlege einen Kanutransporter zu bauen.
Dieser sollte auf öffentlichen Straßen Fahrer dürfen.
Boote sind ca. 5 m lang, meist mit Gepäck.
Hat jemand eine Idee wer helfen könnte?
Gruß Tobias
Verabschiede dich gleich mal von auf "öffentlichen Straßen" fahren. Der Umbau eines Rollstuhls entzieht ihm wohl die Straßenzulassung ^^
Gel batterien laufen nicht aus
Richtig! LiPo Akkus aber auch nicht :)
Hi, sag mal wie hast Du das mit der Bremse den jetzt gelöst? Ausgebaut? oder einfach mit auf den Motor gelegt?
Die Bremsen sind noch dran. Sind ja Scheibenbremsen. Die Motorbremse zieht ja an sobald der Strom getrennt ist!
Also direkt über den Powerschalter
Sobald der Motor auf 0 steht, zieht die Motorbremse an. Der Motor hat nur einen mechanischen Freilauf!
Das habe ich nicht ganz verstnden?
ich auch nicht haha. nein Spaß. Das war nicht korrekt meine letzte Antwort. Der Motor hat eine aktive Bremse die immer zu ist welche sich nur mit 12V öffnen lässt.
Für die Bremse muss ich mir nochwas einfallen lassen!
Bezüglich der Bremse habe ich ein Brückengleichrichter und ein Eltako Relais ER12-100 UC genommen. Den Brückengleichrichter damit das Relais immer + und - gleich hat. Zwar öffnet die Bremse erst bei ca. 9V. Aber passt.
das klingt interessant. Kannst Du da irgendwie ein Foto schicken? Bzw. auch einen Schaltplan? Mich würde der Aufbau interessieren..
Noch Mal eine Frage. Warum hast Du 2 lipos genommen. Parallel geschaltet?
um die Kapazität zu erhöhen hab ich zwei Lipos genommen. Parallel geschaltet.
Hallo Christopher, wie ist dein Stand mit Deinem Gefährt?
Kannst Du mal Foto`s vom Ist fertig zustand Posten?
Baue gerade auch einen nur bekomme ich keinen Regler mit 60 A Dauerbetrieb bei 24 V!
MFG Andre
Hi Andre, leider immer noch der Stand im Blog. Ich komme überhaupt nicht dazu. Leider ist mir das Chassis aktuell zu schwer und er steht im Keller.
Zumindest fährt er :)
Gruß Christoph
Nettes Projekt.
Wenn Du so einen Rolli noch einmal umbaust, könnte ich Dir eine kleine Platine geben, die in das originale Handstück eingebaut wird. Mit der Platine gaukelst Du der original Elektronik einen originalen Handcontroller vor und kannst einfach einen SummensignalEmpfänger anschliessen.
So kann man die komplette Elektrik des Rolli beibehalten.
Hi Sunny, danke schön! Beim nächsten Umbau greife ich darauf zurück! Leider hab ich das chassi inzwischen aufgrund eines Umzuges verkaufen müssen. Vielleicht komme ich nochmal günstig an einen neuen.
ich habe im Mai letzten Jahres einen Schlaganfall mit rechtsseitiger Lähmung erlitten. um mich auf meinem Grundstück gut fortbewegen kann habe ich mir drei von diesen Rollstühlen invacar g40 günstig bei ebay kleinanzeigen gekauft. ..nun kamen mir die Gedanken, eine Veranstaltung für diese stühler zu installieren. meine Idee war das mit Hilfe einer Drohne zu bewältigen. bei der Suche nach weiteren Anregungen, stieß ich auf euer interessantes Projekt. ..da ich nur noch den linken Arm zur Verfügung habe, suche ich natürlich nach einer günstigen Lösung, die mechanisch anstrengende Durchführungen möglichst vermeidet. hier finde ich das Angebot von Sunny besonders interessant. ...es würden mir Freude bereiten wenn er mir, natürlich gegen Kostenerstattung 2 von den Platinen zukommen lassen könnte. ..die Steuerung würde ich dann über RF durchführen wollen(??).