Du suchst was gemütliches, einfaches, etwas zum runter kommen? Dann entschleunige! Mit dem Teksumo FPV Flieger. Und dazu braucht es eigentlich nicht viel.

Teksumo Air-Time 2
Das Setup:
- Motor: Turnigy SK3 2826 1240 KV
- Prop: APC 8×6
- ESC: Kiss 24 Amp
- Servos: Corona 929MG
- Akku: Multistar 3s 3000mah
- FPV-Cam: Foxeer Falkor 2
- Video TX: ImmersionRC 2.4
- HD-Cam: Hawkeye Firefly Q6 4K
- Flight-Controler: Eagletree Micro Vector + Current-Sensor
- Alternativer Flight-Controler: iNav Omnibus evtl.
Meine Erfahrung mit dem Setup:
- Max Speed: ca 80 km/h
- Crouis Speed: 45 – 55 km/h
- Flugzeit je nach Flugstil 15 – 25 Minuten
- Fast unverwüstlich und sehr stabil durch EPP-Schau
- Sehr gutmütige Flugeigenschaften und sehr ruhig für diese Größe und Typ.
Sie sehen gerade einen Platzhalterinhalt von Standard. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Sie sehen gerade einen Platzhalterinhalt von Standard. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Details zum Bau:
Es sind nur ein paar Druckteile, bevorzugt aus PETG nötig, um den kleinen Nurflügler mit nur 900mm Spannweite optimal zu gestalten.
Die Überlegung war, den Wing ein wenig variabel zu halten, was die Akku-Wahl angeht. So habe ich mich für einen längs gerichteten Einbau der Akkuhalterung in Flugrichtung entschieden. So kann ich ihn “leicht”, “mittel” und “schwer” fliegen.
Soll er nah am Boden geflogen werden, fliege ich ihn mit einem Multistar 3s 1400mah Akku. So ist der Teksumo wendiger und hat im Falle einer unsanften Landung nicht so viel kinetische Energie.
Mein Standard-Setup ist jedoch ein Multistar 3s 3000mah. Dieser ist für mich die perfekte Balance zwischen Flugzeit und Fluggewicht/Flugeigenschaften. Wenn ich gemütlich im Tiefflug durch die Gegend cruise, komme ich so auf gute 25 Minuten Flugzeit.
Möchte ich einmal weiter weg fliegen oder brauche mehr Flugzeit, kommt ein Multistar 3s 4000mah zum Einsatz. Man merkt das Mehrgewicht zwar nicht deutlich, aber man merkt es. Für weitere und längere Ausflüge optimal. So sind über 30 Minuten Flugzeit möglich……



Die FPV-Cam, hier eine Foxeer Falcor, wollte ich etwas schützen und habe dazu die bereits in Thingiverse erhältliche Bay für den Ritewing Hardcore etwas umgestaltet und an den Teksumo angepasst. Im Falle eines crashes wird die Energie schön in den EPP Schaum hinter der Bay geleitet. Das ganze hält echt was aus!
Andere Cams gleicher Bauart wie z.B. eine Runcam Swift 2 passen auch schön die die Cam-Bay.


So wie auf den fertig gebauten Bildern zu sehen, ist der Teksumo super im Schwerpunkt. Diesen gebe ich mit ca 60 mm von der hinteren Kante/Mitte zur RC-Bay an. Damit fliegt der Teksumo sehr ausgewogen, stabil und gutmütig.
Ich empfehle ebenfalls, alle Komponenten mit UHU-POR zu verkleben. Da dieser elastisch bleibt im Gegensatz zu Sekundenkleber, macht das den Teksumo deutlich crash-resistenter.
Ebenfalls zum Schutz habe ich vorne die Flächen-Kante mit einem Streifen Laminier-Folie laminiert. Da die Folie so nicht hält auf dem EPP-Schau, habe ich die Fläche darunter mit einer dünnen Schicht UHU-POR eingestrichen . Dieser wird nach dem trocknen unsichtbar und die Folie hält!
Hier ein paar Bilder zur Inspiration, der Teksumo in der Luft:



Gestalte den Himmel bunter….
Den Teksumo gibt es in mehreren Farben:

Teksumo in verschiedenen Farben
Hier findest Du die von mir erstellten und verwendeten Druckteile zum Bau des Teksumos. Die Teile sind bereits in vielen Flügen erprobt und ich empfehle diese gerne: Teksumo-Druck-Teile
Druckteile richtig platzieren
21 Kommentare
Entschleunigen trifft es!
Wie startest den TEKSUMO? Schleuderstart?
Gruß beschue
Einfach vorne an der Kante oder Spitze nehmen und gerade leicht nach oben werfen mit Vollgas!
Hi Michael,
ich wäre dir sehr dankbar, wenn du kurz auf die 3D-gedruckten Teile eingehen könntest.
Ich habe bereits die ersten Teile gedruckt und nebst nen halbfertigen Teksumo vor mir liegen, bin mir aber nicht sicher, welches Teil wohin gehört, bzw. welchen Zweck erfüllt. Bei manchen kann ich es aus den Bildern und Benamsung erkennen, aber leider nicht bei allen.
Danke und Gruß,
Jay
Hi, welche Teile genau meinst du wo du nicht zuordnen kannst?
Hi Michael,
vorweg – Danke für deine schnelle Antwort!
– Liege ich richtig mit der Annahme, dass an Stelle der ‘Cam-Bay’, vorne an der Nase, der Schaum weggeschnitten werden muss?
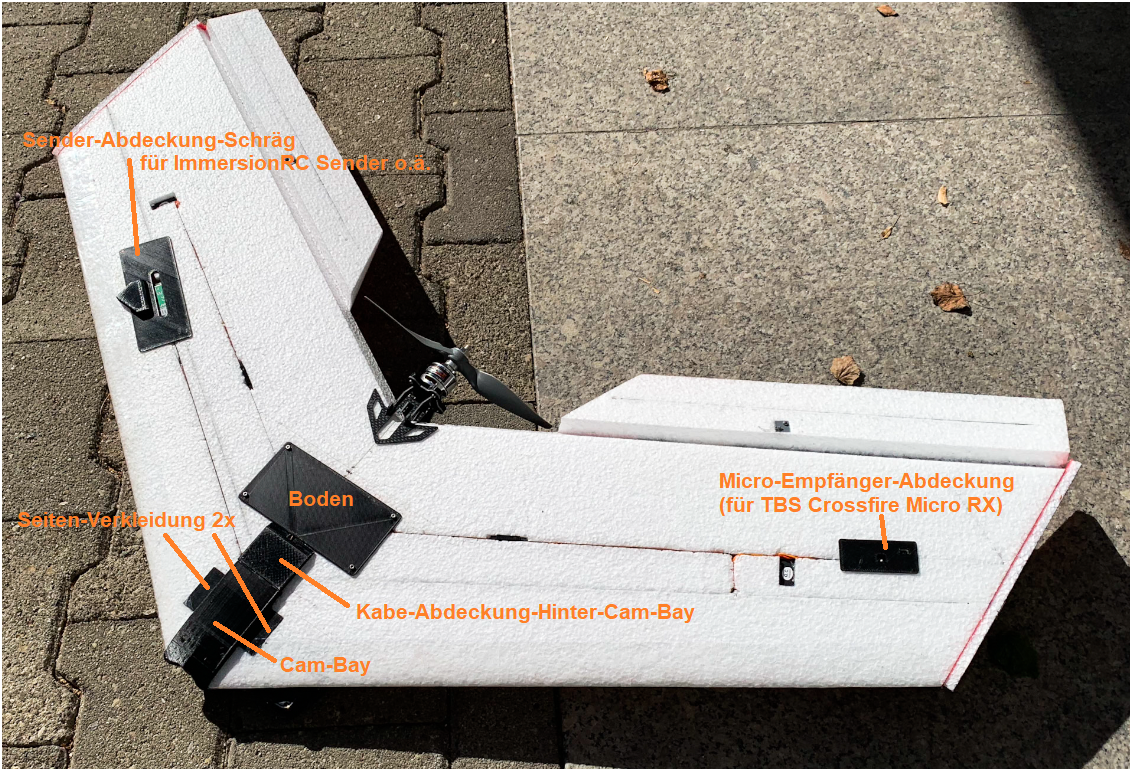
– Wie spielen ‘Kabel-Abdeckung_hinter_Cam-Bay’, ‘Schräge_vor_Akku-Bay’ und ‘Abdeckung_vor_Akku-Bay’ zusammen?
– Wo sitzt die ‘Micro_Empfänger_Abdeckung’?
– Wird für ‘RC-Bay’ ein entsprechend großes, rechteckiges Loch in den Schaum geschnitten?
– Wohin gehören die ‘Seiten-Verkleidungen_2x’?
– Wohin gehört ‘Sender-Abdeckung_Schräg’ – außen in die Fläche?
Von den Fotos kann ich gut erkennen, wo die Cam-Bay, die Action-Cam-Bay, der Akku-Bay, die Servo-Abdeckungen und der Boden und der Deckel sitzen. Die oben erfragten habe ich jedoch nicht erkennen können.
Vielen Dank und Gruß,
Jay
Du musst vorne einen Ausschnitt für die Cam-Bay machen, so weit rein, bis die Bay an der Tragflächen-Kante links rechts bündig ist. Die restlichen Maße ergeben sich dann von allein. Für die RC-bay empfehle ich, die beiden Rahmen-Hälften auf den Deckel-Boden zu schrauben (mit M2 Schrauben), dann auf den bereits vorhandenen Ausschnitt der normal für die RC-Komponenten vorgesehen ist zu setzen (vorne und hinten bündig / links rechts überstehend) und dann mit einem scharfen Cutter-Messer auszuschneiden. Das geht besser,wenn die beiden Tragflächen-Hälften verklebt sind.
Ich hab oben ein Bild angefügt, wo die Teile auf der Unterseite noch einmal beschreibt.
Grüße
Hi Michael,
superklasse – jetzt wird einiges klarer 😉
Vielleicht noch zwei weitere Fragen…
– welchem Zweck dienen die 2x gedruckten Seiten-Verkleidungen?
– (ich weiß natürlich, dass du nicht der HK-Support bist… aber) haben deine Motormounts auch einen leichten Sturz nach unten? Oder sollte der Motormount mit 0 Grad relativ zur glatten Unterseite entlang zeigen?
Noch einmal vielen Dank für deine Mühen und viele Grüße,
Jay
Hi Michael,
ich habe gerade gecheckt wofür die Seitenverkleidungen da sind – Frage hat sich also erübrigt.
Mir ist beim Bau aber noch nicht klar geworden, wie ‚Schräge_vor_Akku-Bay‘ und ‚Abdeckung_vor_Akku-Bay‘ zusammenpassen. Hängt die Schräge zwischen der AkkuBay und der Abdeckung in der Luft (und liegt nur vorne und hinten auf)?
Danke und Gruß,
Jay
Das ist relativ einfach, die kommen einfach aufeinander und ist mehr für die Optik ;D
Hallo Michael,
wie lange dauert der Druck aller 11 Teile ungefähr?
Gruß Ron
Hi Ron,
ich erlaube mir mal zu antworten, wenn auch nicht direkt angesprochen.
Die Druckdauer hängt maßgeblich von der gewählten Schichtdicke und Geschwindigkeit ab.
Ich habe alle Teile in ca 9,5 Stunden gedruckt. Das ganze über vier Abende verteilt 😉
Beste Grüße,
Jay
Hi Jay,
kein Problem und danke für die schnelle Antwort .
Das ist ja doch etwas Zeit intensiver als ich dachte.
Ron
Ja, ca 10 stunden hätte ich auch gedacht, ich hab alles in 0,2 Layerhöhe gedruckt. Grüße Michael
Hallo Michael,
ich habe ein paar Fragen zu deinem Beitrag „Entschleunigung TEKSUMO…“.
Ich beschäftige mich erst seit 5 Jahren mit Koptern und habe seitdem Quadrokopter, Hexakopter und Trikopter gebaut, getestet und schließlich erfolgreich (was man so nennt) in die Luft bekommen.
Kürzlich bin ich 80 geworden, also schon „betagt“, aber trotzdem noch technikvernarrt. Als ich vor 5 Jahren mit dem Flugmodellbau angefangen habe, hatte ich mir neben einem Quadrokopter auch einen TEKSUMO gebaut. Der Erstflug ging mangels Erfahrung gründlich daneben. Seitdem hängt der Nuri an der Zimmerdecke.
In diesem Winter habe ich nun einen 2.Anlauf gewagt und den Nuri mit einem FC Mateksys Z405-wing ausgestattet in der Hoffnung, dass ich damit meine fehlenden Flugerfahrungen mit Planes kompensieren kann.
Noch traue ich mich nicht an den Maiden flight. Deshalb folgende Fragen an dich:
a) Problematik Start: Ich habe mir im Internet alle möglichen Varianten angeschaut. Mittlerweile wiegt mein TEKSUMO 600 g mit LIPO 2200 mAh. Dein TEKSUMO müsste ja mit einem LIPO 4000 mAh noch mehr wiegen. Ich habe einen 7x5E“-Propeller (starr) angebaut, der von einem HK 2818/1350KV-Motor angetrieben wird. Da ich keinen Helfer habe, muss ich den Start selbst übernehmen. Ich dachte an Vollgas und dann geführtes Wegwerfen vom Rand des linken Flügels (Rechtshänder) schräg nach vorn oben. Wieviel Beschleunigung muss ich in den Wurf investieren? Oder benutzt du noch eine andere, sicherere Variante? Vielleicht kannst du die Antwort weiter oben noch etwas ausführlicher erläutern.
b) Problematik Landung: Irgendwie muss ich den Nuri ja auch wieder heil landen. Man sieht ja immer wieder in Youtube, wie der Nuri im Anflug mit der Hand abgefangen wird. Aber ist das für mich als Neuling eine Variante (Verletzungsgefahr) oder was würdest du mir empfehlen?
c) Ich habe den FC Z405-wing mit Arduplane geflasht, da ich alle meine Kopter mit FC-Ardupilot ausgerüstet habe (APM2.7, Pixhack von CUAV) und mit dieser Firmware gute Erfahrungen gemacht habe. Die Trockentests am Nuri mit den Flugmodi FBWA, FBWB, Stabilize funktionieren nach meinen visuellen Beobachtungen so wie sie sollen.
Nun habe ich im Internet gelesen, dass beim Start eine leichte Höherstellung der Querruder (13 Grad) den Start verbessern kann. Dafür verstelle ich das Höhenruder mittels Poti und Schalter am Sender nur für den Start.
Was hältst davon? Was könnte passieren, wenn man zuviel am Höhenruder verstellt?
d) Mein Ziel ist ein Nuri, mit dem ich softig und entspannt fliegen kann, keine Rollen, keine Loopings, kein wildes Cruisen. Eben entschleunigt !!! Wenn ich mit dem TEKSUMO klar komme, werden ein GPS-/Compass-Modul (wegen RTL)und die Telemetrie ergänzt.
Ich würde mich freuen, wenn du die Zeit findest, meine Fragen zu beantworten.
Viele Grüße aus Magdeburg
Bernd Schütze
Servus Bernd, sorry für meine späte Antwort.
80 ist doch kein Alter, finde es super dass Du dich für so was begeistern kannst…… Als absoluter Flächen-Neuling würde ich Dir empfehlen einen Wurf-Helfer mit zu nehmen, dann kannst Du Dich voll und ganz auf das Steuern konzentrieren.
Eine sichere Variante ist diese hier: https://www.youtube.com/watch?v=5K88tBjLys8
Wichtig: Nurflügler brauchen immer leicht höhe in den Rudern um gerade aus zu fliegen….. Hier hilft sehr gut diese Einstelllehre : https://www.thingiverse.com/thing:2814529. Der Winkel passt ziemlich gut.
Eine weitere Empfehlung von mir. Wenn noch keine oder so gut wie keine Flächen-Erfahrung vorliegt, empfehle ich ein paar Stunden am Simulator zu üben und dann erst mal einen Teksumo ohne FPV auf leicht zu bauen, und auf Sicht zu üben….
Viele Grüße
Michael
Hallo Michael,
vielen Dank für deine Antwort.
Leider habe ich keine Möglichkeit, mir die Einstelllehre mit einem 3D-Drucker herzustellen.
Wenn du so freundlich bist und mir den Winkel oder die Höhe mitteilst, würde ich mir eine Lehre aus Pappe anfertigen.
Im Internet habe ich für den “Reflex” (Ich denke, dass ist die Verstellung der Elevons nach oben?) folgende Werte gefunden: Höhe= 4,7 bis 6,25 mm, entspricht 4,5 bis 6 Grad.
Gilt diese Verstellung nur in der Startphase oder grundsätzlich für Nuris?
Heute habe ich die Akkus von Hobbyking erhalten. Wenn das Wetter mitspielt, werde ich morgen einen ersten Flugversuch wagen.
Viele Grüße
Bernd
Hallo Michael, Hallo Bernd,
Das würde ich auch interessieren. Vielen Dank für den Beitrag. Der inspiriert mich zum Bauen habe aber ähnliche Fragen wie Bernd. Ich hoffe da kommt noch eine Antwort von Dir!
Gruß Robert
Ich habe es eben im CAD angeschaut, die Ruder müssen für neutralen Geradeaus-Flug um 12 Grad nach oben gestellt werden zur Flächenunterseite. Also den Flieger plan auf den Tisch legen und die Ruder um 12 Grad nach oben anstellen.
Hallo Michael,
noch eine Frage zu dem Prop. Ich fliege meine Kopter mit starren Props. Mit anderen Props habe ich keinerlei Erfahrung.
Würdest du mir als “Anfänger” für den TEKSUMO einen Klapp-Propeller oder einen Safe-Prop empfehlen? Vor allem bei der Landung sehe ich Probleme mit starren Props. Nicht überall gibt es Wildwiesen mit 50 cm Wuchshöhe. Ich werde jetzt 7×5” fliegen, liebäugle evtl. mit 8×5”. Mit letzterem ist vielleicht der Start wegen des größeren Schubs noch einfacher.
Ich würde mich freuen, wenn du mir auch gleich eine Empfehlung eines Herstellers und eines Shops geben könntest.
LG Bernd
Hallo Bernd,
ich hake da mal wieder ein. Primär, weil ich eine eigene Frage habe, jedoch nicht will, dass deine unter geht. 😉
Prinzipiell denke ich, dass du dir wegen des Starts nicht soo viele Sorgen machen musst. Jedenfalls sollte der Flügel sowohl mit ner 7er als auch ner 8er Latte gut starten. Die Länge/Steigung hat natürlich Auswirkungen auf den Schub (Start), jedoch ist die Überlegung mMn wichtiger in Hinblick auf Energieeffizienz und somit Flugdauer. Naja, und mehr Amps als dein ESC/Motor verkraftet, sollte dein Setup natürlich auch nicht ziehen 😉
Zur Frage nach starrer Prop, Klapp-Prop etc. rate ich dir zur Verwendung eines Propsavers. Also den Prop mit nem O-Ring an der Aufnahme befestigen. Wenn du die Motorbremse im ESC anmachst (Programmierung per Karte oder per Knüppel-Eingabe), ist auch die Wahrscheinlichkeit gar nicht so gering, dass sich der Prop im Leerlauf in das Profil des Flügel dreht.
Hoffe, ich konnte dir damit weiterhelfen – viel Erfolg!
So, nun also zu meiner Frage/Bitte:
Michael – es würde den weiteren Bau mega erleichtern, wenn du mal nen Bild vom Innenleben deiner RC-Bay hochladen würdest.
Ich hab mittlerweile alle Teile (sowohl Elektronik als auch 3D-Druck) hier liegen. Der Teksumo ist fertig gebaut, der Motor befestigt und die Servos eingesetzt. Jetzt würde ich im nächsten Schritt gerne das ESC, das PDB, den FC, den Buzzer und das GPS einsetzen. Zuletzt kommen dann noch der Empfänger, der VTX und die FPV-Cam. Aktuell bin ich unsicher, was ich wie idealerweise in die RC-Bay setzen kann.
Danke und viele Grüße,
Jay